


개요
자동차 업계는 CAN과 FlexRay를 넘어서는 차세대 차량용 네트워킹 인프라로 이더넷을 가장 유망한 후보로 주목했다. IEEE 표준으로 소비자 및 산업 영역에서 많이 사용되고 있는 이더넷은 부품, 소프트웨어 및 툴을 위한 재사용 계수(reuse factor)가 높다. 또한 이더넷은 새로운 운전자 지원 시스템(DAS), 인포테인먼트 시스템 등에 필요한 대역폭 성능을 제공한다. 그러나 성공적인 적용을 위해서는 자동차 산업용 솔루션을 확장성, 저비용, 저전력, 견고성의 측면에서 좀 더 최적화할 필요가 있다. 물리 계층 수준에서 이루어져야 할 첫 번째 최적화 단계는 이미 시작됐지만 자동차에 좀 더 중점을 둔 더 많은 혁신이 필요하다. 이 글에서는 새로운 네트워크 토폴로지와 구성요소들에 관해 논의하고, 이더넷을 자동차 응용 분야에 적용하기 위한 점진적 과정에 대해 설명하고자 한다.
1. 서문
차량의 안전성 강화 및 엔터테인먼트 솔루션을 위해 새롭고 복잡한 애플리케이션이 증가하면서 통신 및 대역폭에 대한 요구도 증가하고 있다. 최종 사용자들은 차량에서도 집에서와 같은 수준의 엔터테인먼트 기능을 기대한다. 또한 LIN, CAN, FlexRay표준과 같은 기존의 차량 제어 네트워크는 대역폭이나 확장성 측면에서 다양한 종류의 운전자 지원 시스템(DAS)의 요구 증가를 충족시킬 수 있도록 설계돼 있지 못 하다. 미래의 네트워킹 기술은 소비재 영역이나 비-자동차 영역의 자원들을 최대한 재사용하는 한편, 자동차 고유의 요구사항도 고려해야 한다. 하드웨어 구성요소는 물론 소프트웨어 스택도 포함된다. MOST (Media Oriented Systems Transport)와 같은 높은 대역폭을 위한 통신 솔루션도 활용할 수는 있지만 자동차 네트워킹 시스템에 광범위하게 사용되기에는 비용이 매우 비싸다. 현재 차량 탑재 네트워킹 아키텍처는 고유의 역사적 성장 배경으로 인해 이종 시스템으로 나타나게 된다.(그림 1의 왼쪽 도식 참조)
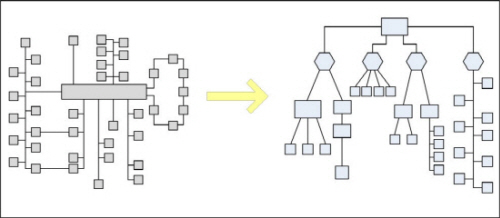
그림 1. 현재와 미래의 도메인 아키텍처
기존 개념을 완전히 탈피하여 완전히 새롭게 설계된 차량용 네트워킹 시스템은 그림1의 오른쪽 도식에서와 같은 아키텍처로 구현될 가능성이 높다. 여기서 ECU는 계층형 아키텍처로 구성되어 있어, 애플리케이션 도메인이 데이터 하이웨이를 통해 연결된다. 이더넷은 이러한 종합적 접근법에 필요한 모든 선결조건을 충족시킨다. 여러 애플리케이션 도메인을 연결하는 백본 버스로 사용할 수도 있고 높은 대역폭을 요구하는 서브네트워크에 사용할 수도 있다. 현재 스위치 이더넷 네트워크(switched Ethernet networks)는 일대일(point-to-point) 통신 방식을 사용하는데, 이 경우 CAN이나 FlexRay와 같은 방송 시스템과 비교해 가용 대역폭을 더 효율적으로 사용할 수 있다. 스위칭 개념은, 복잡한 게이트웨이에서 필요에 따라 전송된 메시지나 패키지를 패킹하고 재분류하는데 많은 시간을 소모할 필요 없이 도메인 영역들을 연결하는데 편리하게 적용할 수 있다.
자동차 분야에 이더넷을 사용한다는 것은 차세대 차량용 네트워킹 시스템 설계에 있어서 하나의 패러다임 전환을 의미할 수 있다. 또한, 서로 다른 도메인 네트워크를 연결해서 서로 다른 종류의 데이터(제어 데이터, 스트리밍 등)를 전송하고 넓은 온도 범위와 EMC 성능의 측면에서 견고성에 대한 엄격한 요구를 충족시킨다는 것을 의미한다.
2. 자동차 이더넷의 진화
이더넷은 개방형 LAN 표준으로, OSI 참조 모델의 두 개 하위 계층을 정의한다. 지난 수 십 년간 IEEE 802 표준화 위원회는 10 Mbps부터 최대 10 Gbps까지 여러 가지 물리 계층을 규정해 왔다. IEEE 802.3u (100Base-TX)는, 소비자 및 산업 영역에서 널리 사용되고 있고 최근에는 ISO 13400에서 설명하고 있듯이 인터넷을 통한 차량 진단(car diagnostics over IP)을 위한 표준으로 채택됐다.
그림 2에서 보듯이, 데이터 링크 및 물리 계층 외에 더 높은 계층들을 고려해야 한다. AVnue 얼라이언스의 오디오/비디오 브리징(AVB) 실무진[1]은 IEEE 802-호환 네트워크를 위한 더 높은 수준의 서비스에 적용되는 IEEE 표준을 정의했다. IEEE 802.1 AS, QAT, QAV 및 BA 프로토콜은 오디오/비디오 브리징 시스템에서 어드레스 타이밍 및 동기화, 스트리밍 보존, 전환 및 대기 기능을 담당한다. 또한, IEEE/1722와 같은 전송 프로토콜 계층 표준은 스트리밍 시간에 민감한 오디오나 비디오 신호의 이더넷 AVB 네트워크 전송을 도와주고 최종 스테이션 간의 상호연동성을 촉진시켜 준다.
운전자 지원 시스템은 점차 서라운드 뷰 (surround view) 와 같은 응용 분야를 위해 비디오 카메라를 이용하고 있다. “카메라를 위한 비디오 통신 인터페이스”라는 ISO 17215에서 최근에 통신 프로토콜과 물리 계층의 표준화를 위한 활동이 시작됐다. 차량용 이더넷 기술의 발전을 도모하기 위해 물리 계층을 위한 소위 OPEN(One Pair EtherNet Alliance)라는 업계 단체가 설립됐다. 소위 “OPEN 얼라이언스”라고 불리는 이 단체는 브로드컴(Broadcom)의 BroadR-Reach 기술을 바탕으로 부품 표준화 작업과 호환성 테스트를 실시하게 될 것이다[2]. 이 단체의 또 다른 의도는 “경량 기가비트(Reduced Pair Gigabit)”와 같은 미래 기술을 위한 요건들을 정의하는 것이다. 결국 AUTOSAR는 소프트웨어 계층 스택에서 자동차용 이더넷을 처리하게 된다.
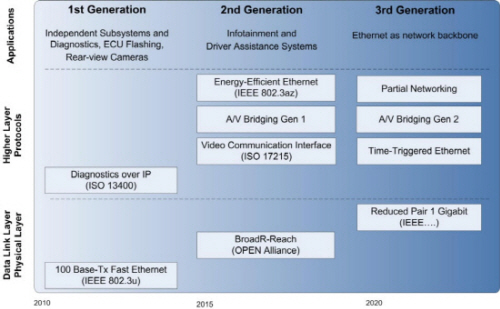
그림 2. 이더넷 로드맵, 세대별 계층 구성
이더넷은 TDMA 네트워크를 위해 개발된 것이 아닐뿐더러, 필수적인 실시간 성능 및 서비스품질(QoS) 요구를 충족시킬 수 있는 적절한 솔루션 개발이 아직도 자동차 시스템에서 해결해야 할 과제로 남아 있다. AVB는 시의 적절한 미디어 스트림 전달을 위한 수단을 이미 포함하고 있다
자동차 AVB Gen2 실무진의 가장 큰 목표 중 하나는 지연 시간의 개선이다. 타임 트리거 이더넷(Time-Triggered Ethernet)이 가장 먼저 적용된 분야는 안전성 수준에 대한 요구가 가장 높은 항공전자 시스템이었다. SAE AS6802에 정의되어 있으며 오디오/비디오 브리징과는 다른 TTEthernet은 결정론적 행동에 맞춰 정확한 스케줄을 만들어내는 분산형 클록-동기화 알고리즘에 기반하고 있다.
AVB와 TTEthernet의 통합도 가능하지만[4], 멀티미디어 스트림, 실시간 제어 데이터는 물론 진단 정보와 소프트웨어 업데이트도 하나의 네트워크를 통해 전송해야 하는 자동차 애플리케이션에 적용하려면 더 많은 연구 조사가 필요하다.
2.1 1세대: 인터넷을 통한 진단
이더넷이 자동차 산업에 처음 사용된 것은 온보드진단(OBD)과 ECU 플래시 메모리 업데이트였다. 정해진 시간 내에 진단 정보를 읽고 소프트웨어를 업데이트하는 데는 CAN이나 FlexRay와 같은 기존의 차량용 버스 시스템의 성능으로는 충분하지 않았다. 차량과 진단 시험 설비 사이의 인터페이스를 위해 이더넷 100Base-TX(CAT)가 선택됐다. 이더넷의 높은 대역폭은 서비스 및 생산에 있어 비용을 절감해 준다. ISO 13400과 ISO 14229는 기존의 산업 표준을 활용해서 장기적으로 안정적인 첨단 진단 표준을 정의한다. 이러한 특정 용도에 맞춰 견고성과 허용 온도와 같은 요건이 완화되면서 여러 공급업체에서 이미 관련 제품과 부품을 출시하고 있다.
2.2 2세대: 운전자 지원 시스템과 인포테인먼트
2세대 자동차 이더넷은 인포테인먼트와 서라운드 뷰를 위한 카메라 시스템을 처리하게 될 것이다. 현재의 후방감시 카메라 솔루션은 비디오 데이터 전송을 위해 주로 LVDS를 사용하는데, 단일 카메라용으로는 원활하게 동작한다. 미래의 시스템에서는 카메라 수가 더 많아지고 단거리/장거리 레이더에서 보내진 센서 데이터와 통합 처리될 것이다(그림 3).
이더넷 카메라는 카메라를 사용하지 않을 때 에너지를 절감하기 위한 저전력 대기(LPI) 모드와 웨이크업(wake-up) 기능을 도입한 “에너지-효율적 이더넷” (IEEE 802.3az)을 이용할 수도 있다. 또한, 복잡한 배선을 단순화하는 급전 이더넷(PoE)용 솔루션도 선호되고, 고대역폭과 저 지연성에 대한 요구도 분명히 존재한다. 감시용으로 여러 대의 고해상도 카메라를 사용하려면 압축 오류 등을 방지하기 위해 데이터 비압축 전송이 필요하게 되고, 이를 위해 고 대역폭이 요구된다.
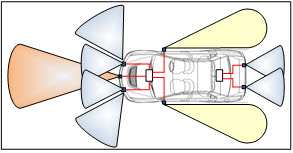
그림 3. 운전자 지원 시스템용 카메라와 레이더
최근의 인포테인먼트 솔루션들은 주로 독점적이고 확장이 불가능한 기술에 기반하고 있다. 자동차 이더넷은 AVB를 이용하여 이 새로운 분야를 비용 효과적으로 적용시키고 있다. 비디오와 오디오 데이터를 지연 없이 동기화 전송하는 것은 이미 기존의 AVB Gen1 이더넷 구성요소들로도 가능하다. 그러나 두 분야 모두 Avnu의 현재 표준화 활동과 BroadR-Reach 물리 계층에 기반한 최근의 스위치 및 PHY 개발을 통해 혜택을 얻을 수 있다.
2.3 3세대: 네트워크 백본으로서 이더넷
1세대와 2세대 이더넷은 여전히 인포테인먼트나 운전자 지원과 같은 특정 용도의 서브넷에 국한되어 있지만, 3세대 이더넷은 차량용 네트워크의 백본이 될 것이다. 전형적인 백본은 그림 4에서 보는 바와 같다. 이러한 네트워크 설계는 네트워크 관리를 통한 ECU 간의 통신 방식에 있어 패러다임의 전환을 가져올 것이다.
통신 네트워크가 계층형으로 구성되며 메인 도메인 컨트롤러는 이더넷 백본을 통해 연결된다. 도메인 컨트롤러 하위의 서브넷 역시 이더넷을 기반으로 할 수 있으며 스위치가 네트워크 수준들을 서로 연결해 준다. 이러한 구조는 스위치의 각 포트를 더 높은 계층의 프로토콜을 변경하지 않고도 10 Mbps, 100 Mbps 또는 1 Gbps로 구현할 수 있기 때문에 확장형 솔루션의 구현이 가능하다.
메시지가 도메인 경계를 경유해서 목적지로 전송되는 방식에 있어서도 패러다임의 전환이 가능하게 됐다. 현재의 네트워크에서 이 기능은 복잡한 네트워크 기반의 게이트웨이에 의해 구현되고 있지만, 백본 네트워크의 경우에는 스위치 및 라우터의 기존 성숙한 IP-기반 라우팅이 제안되고 있다. IP 기반 라우팅은 근간이 되는 네트워크 구현과 완전히 독립적으로 이루어지기 때문에 차량 네트워크 전체적으로 동질적 어드레싱(homogeneous addressing) 개념을 적용할 수 있다는 게 이점이다. 또한, IP 콘셉트는 차량 인프라와 인터넷 간의 직접 연결이 가능한데[5], 집에서 사용하던 인터넷과 똑같이 접속하기를 바라는 최종 사용자들의 기대에 맞춰 빠르게 발전하고 있다.
새로운 아키텍처의 또 한가지 특성은 기본적으로 이더넷이라는 단 하나의 백본 네트워크 기술이 존재할 것이기 때문에, 진단, 비디오/오디오 스트리밍, 매우 의존적인 제어 데이터 등 다양한 데이터 통신 클래스들을 모두 수용해야 한다. AVB 이더넷과 TTEthernet은 이미 실시간 성능과 결합된 다양한 수준의 통신 서비스품질(QoS)을 제공하고 있지만, 이처럼 다양한 데이터 통신 클래스들이 동일한 네트워크에서 안정적으로 공존할 수 있는지 검증하기 위한 추가적인 R&D 활동이 필요하다.
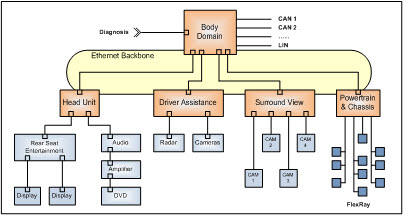
그림 4. 도메인 아키텍처의 이더넷 백본
3. BroadR-Reach – a 100Mbps 자동차 이더넷 솔루션
100 Mbps 이더넷과 IP 기술은 1990년대 초반부터 사용돼 왔지만 자동차 산업이 차세대 차량용 네트워킹 표준으로 이더넷에 관심을 가지기까지 거의 20년이 걸렸다. 차량에 사용하기에 적합한 물리 계층이 없다는 것이 한 이유였다. 그림 5는 기술적 원리들을 좀 더 상세하게 그리고 있으며 소비자 중심의 고속 및 기가비트 이더넷의 물리 계층들이 차량에 적용되지 못한 이유를 설명하고 있다. 고속 이더넷은 MLT-3 시그널링 체계(+/0/- 등 세 가지 수준으로 구분)에 기반하고 있으며 두 쌍의 권선(twisted pairs of cable)을 이용한 단방향 통신을 특징으로 한다. 기가비트 이더넷은 4쌍의 권선과 PAM-5 기반의 시그널링 체계를 이용한 양방향 통신을 도입함으로써 10배 더 빠른 데이터 속도를 달성한다. MLT-3 시그널링에 비해 PAM-5의 6 dB 신호대비잡음 손실을 보상하기 위해서는 값비싼 전진 오류 수정 코드(Trellis)를 채용해야 한다.
고속 이더넷 및 기가비트 이더넷 모두 125 Mbaud의 높은 심볼 레이트(symbol rate)로 인해 주요 FM 무선 주파수 대역에서 전자기 방출에 상당한 영향을 미치기 때문에 자동차 환경에서 비싸지 않은 비차폐 권선을 사용할 수 없게 됐다. BroadR-Reach 기술로 인해 심볼 레이트를 거의 66.6 MBaud까지 낮출 수 있게 됨에 따라 비차폐 권선을 사용할 수 있게 됐다. 원칙적으로 BroadR-Reach는 양방향 통신 체계를 채택하면서도 한 쌍의 권선을 요구하기 때문에 기가비트의 “라이트 버전”으로 간주할 수 있다. PAM-3 시그널링 덕분에 전진 오류 수정 없이도 10-10 이하의 낮은 비트 오류율(bit error rate)을 달성할 수 있다.
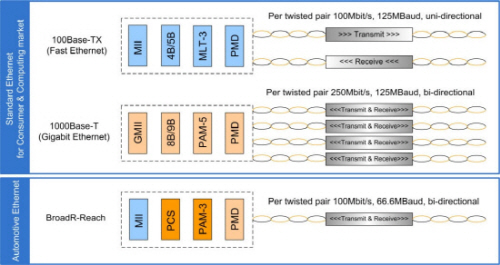
그림 5. 표준 이더넷 및 BroadR-Reach의 코딩 체계
자동차 응용분야는 컨수머 분야와 비교하여 EMC [ISO1145] 및 환경 조건 측면에서 전자 시스템이나 구성요소에 대한 조건이 상당히 까다롭다. 초기 연구에 따르면, BroadR-Reach는 자동차 환경에서 사용하기에 적합하다. 그러나, 차세대 차량 네트워킹 표준에 적합한 내구성을 갖추기 위해서는 최적화된 구성요소들을 새로 개발할 필요가 있다. 그림 6의 시스템 도면은 자동차 BroadR-Reach 링크의 주요 구성요소들을 보여주고 있다. 표준 고속 이더넷과 비교하면 재료비를 크게 절감할 수 있다. 재래식 변압기 대신 용량 결합을 적용할 경우 물리 계층의 하드웨어 조건[PHY, 공통 모드 초크(CMC), 결합 커패시터, 커넥터 및 UTP 케이블 등으로 구성]이 FlexRay나 CAN 링크와 매우 유사하다.
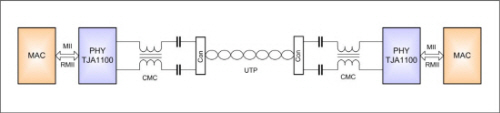
그림 6. BroadR-Reach 계통도
아날로그 전송 매체와 디지털 MAC 컨트롤러 사이의 인터페이스로서 PHY는 링크의 내구성 및 방사 성능을 결정한다. 소비자 PHY는 길이 100 m 이상의 케이블을 지원하도록 최적화되어 있지만 자동차용 PHY는 보통 10 m 미만을 처리하도록 되어 있다. 여기서 문제는 그러한 케이블 길이에 최적화되어 엄격한 발사 및 내구성 조건을 갖춘 펄스 성형 및 리시버 이퀄라이저를 구현하는 것이다. 그림 7은 펄스 성형(pulse shaping)이 최적화된 NXP 트랜스미터 콘셉트의 신호 스펙트럼을 보여주는데, 자동차용 발사 요건은 값비싼 로우패스(low-pass) 필터 부품을 사용하지 않고서도 충족시킬 수 있음을 알 수 있다. 그에 비해 고속 이더넷 트랜스미터의 신호 스펙트럼은 FM 무선주파수 대역에서 발생하는 신호 에너지가 더 높다는 것을 알 수 있다.
비차폐 권선 사용이 가능한 BroadR-Reach 기술 덕분에 이더넷은 자동차 응용분야를 위한 비용 효과적 솔루션으로 적용 가능하다. FlexRay 케이블은 엄격한 자동차 환경 조건에 부합할 수 있기 때문에 자동차 이더넷용으로도 최선의 선택이다. 소비자 응용분야와는 반대로 이더넷 신호 무결성에 있어 환경 조건(주로 온도)이 미치는 영향에 대한 주의 깊은 연구가 필요하다. 그림 8은 실온에서 20 m FlexRay 케이블의 아이 패턴과 케이블 온도가 105 °C일 때의 패턴과 비교하고 있다. 고온에서 아이 오프닝(eye opening)이 더 작은 것은 케이블 대역폭 제한으로 인한 부호간 간섭(ISI)이 증가함을 나타낸다. 케이블 길이가 20 m 이하로 유지된다면 신호대잡음비 감소는 보통 비트 오류율 손상 없이 리시버 측의 적응 등화(adaptive equalization)를 통해 상쇄할 수 있다.
BroadR-Reach 기술을 통해, 비용 효과적이면서도 EMC, 견고성 및 환경 조건의 측면에서 주요 요건을 충족시킬 수 있어 자동차 분야에 적합한 물리 계층을 이용할 수 있다. BroadR-Reach 기술의 모든 잠재력을 개발하기 위해서는 자동차 전용 PHY 및 커먼 모드 초크(common mode chokes)의 개발이 요구된다.
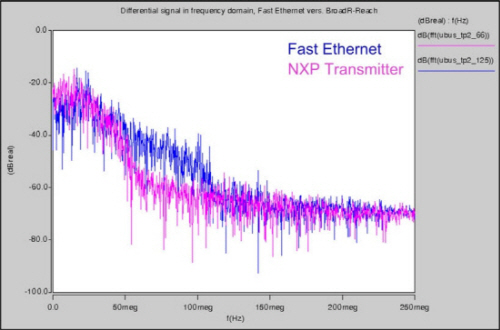
그림 7. 신호 스펙트럼
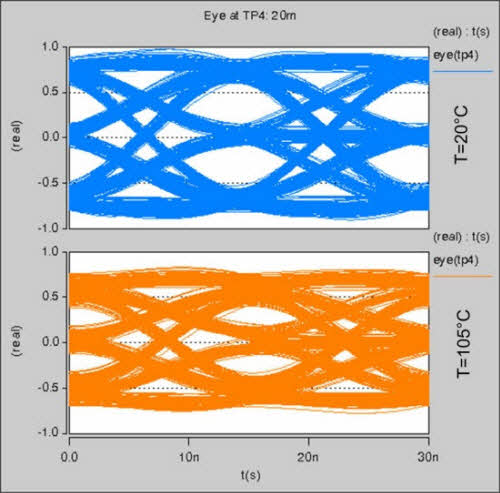
그림 8. 신호 아이패턴
4. 요약
AEM_Automotive Electronics Magazine
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>


