



구글의 지주회사 알파벳이 로봇택시의 미래를 앞당길 자율주행 전용차선 건설을 위해 모터시티에 손을 내밀었다. 도시 인프라를 배제한 로봇택시의 실패인가, 미래를 당기기 위한 한 수인가. 아니면 캐나다에서 좌초된 스마트시티 사업의 부활인가. 분명한 것은, 완전한 자율주행은 생각보다 어렵고, 자율주행차를 만드는 회사들은 인프라가 진화하고 있지 않기 때문에 V2V에 투자하지 않고 있다는 것이다.
글|한상민 기자_han@autoelectronics.co.kr
『구글은 토요타 프리어스(Prius) 7대, 아우디 TTS 1대를 자율주행차로 개조해 테스트해왔다. 이 차들은 산타모니카 마운틴 뷰 캠퍼스를 출발해 헐리우드 대로를 달렸고, 구불구불하기로 유명한 샌프란시스코의 롬바드 거리, 거센 바람을 이겨내야 하는 금문교를 건넜으며, 아슬아슬한 해안 벼랑 위를 달리는 퍼시픽 코스트 하이웨이를 통과했다. 거대한 타호호수를 한 바퀴 돌며 결과적으로 14만 마일(22만 5,000 km) 이상을 주행했다. 구글은 자율주행차 개발을 위해 지난해에만 수익의 12%인 28억 달러(3조 2,400억 원)을 투자했다.』
92조원
2010년 본지의 ‘자율주행, 가을의 전설이 되다’란 기사의 한 대목이다. 10년이 지난 지금, 실리콘밸리에서 시작된 로봇택시에 대한 거대한 도전은 ‘일시후퇴’한 것처럼 보였고, 디트로이트를 찾아 ‘적과의 동침’(?)을 선언했다. 도시 인프라를 배제한 로봇택시의 실패인가, 미래를 당기기 위한 한 수인가, 아니면 캐나다에서 좌초된 스마트시티 사업의 부활인가.
자율주행을 위한 가짜 도시 ‘M시티’, 버려진 공장과 활주로를 개조해 더욱 규모를 키운 ACM(American Center for Mobility) 등, 구글의 지주회사 알파벳은 자율주행의 또 다른 진영을 찾아 그들의 로봇택시를 더 빨리 불러올 도로건설을 위해 모터시티와 손잡았다.
8월, 알파벳의 스마트시티 인큐베이터인 사이드워크 랩(Sidewalk Labs), 인프라 부문 최고 기관투자사 온타리오 티처스 팬션 플랜(OTPP)을 통해 설립된 사이드워크 인프라스트럭처 파트너스(Sidewalk Infrastructure Partners, SIP)는 포드의 지원까지 업고 자율주행 인프라 프로젝트를 위한 새 자회사 ‘카브뉴(Cavnue)’를 설립했다. 그리고 미시간주와 손잡고 자율주행-커넥티드 카를 위한 40마일(64 km), 디트로이트와 앤아버를 잇는 94번 도로에 전용차로를 만드는 새로운 프로젝트(Connected and Automated Vehicle Corridor, CAV-C)”에 착수했다.
한 가지 분명한 것은, 구글을 포함한 실리콘밸리, 기존 자동차 산업이 레벨 4 이상 자율주행 택시를 목표로 막대한 투자를 해 왔지만, 이것이 인프라 지원 없이는 쉽지 않았다는 것이다. 심지어 카 메이커의 레벨 3 고속도로 자율주행도 노변 인프라 지원 없이(또, 인프라 지원이 있다고 해도) 가능하지 않고, 사고에 대한 책임 부담으로 레벨 2 운전자 지원 시스템(ADAS)에서 멈춰 있는 상황이다.
CAV-C 프로젝트 제안서도 ‘800억 달러(92조 원) 이상이 자율주행 솔루션에 투자됐음에도 불구하고, 완전한 자율주행은 수십 년은 아니겠지만 수년은 더 걸린다. 하지만 이같은 투자가 ’커넥티드 카 및 자율주행차(CAV)‘의 보급을 가속화하고, 협력 되지 않는(uncoordinated) 자율주행차를 더 잘 작동할 수 있도록 할 것이며, 관련 인프라 투자를 감소시킬 것이다’, ‘현재 높은 수준의 자율성을 달성하는 것은 원래 계획했던 것보다 더 복잡하고, 아직도 많은 시간이 남았다는 공감대가 형성되고 있다’고 명시하고 있다. 카브뉴의 공동창립자 조너선 위너(Jonathan Winer)는 “일반적인 합의는 우리가 생각한 것 이상으로 어렵다. 우리가 기술에 수십억 달러를 쓰고 있다면, 빠른 시일 내에 상업적 비즈니스가 요구된다”고 말했다.
기술적으로, 프로젝트의 목표와 포드, BMW, 혼다, MDOT 등 협력 파트너를 고려할 때, C-V2X 가 가장 유력해 보인다. 적용에 관해서는, 카브뉴 전용차선이라는 개념으로 볼 때, 2차, 3차에는 유즈케이스의 활용이 적용될 것으로 예상된다. 이를 위해 온보드 자율주행차 센서(perception sensing)와의 원활한 통합과 RSU의 V2I 지원이 모두 필요핟. 사례 중 일부는 차선 병합과 플래투닝이다.

디트로이트가 필요해
CAV-C와 같은 자율주행 도로, 전용차로 건설은 카브뉴가 처음이 아니다. 자율주행 기능을 갖춘 차량을 일반 차량과 분리함으로써 초기 자율주행 시스템을 보다 빠르고, 안전하게 도입해 자율주행 시대를 당기고자 하는 시도는 이미 전 세계 곳곳에서 전개되기 시작했다. V2X를 위한 도시 인프라는 전 세계 도시 곳곳에서 테스트, 적용되고 있다. 나아가 토론토에서 실패한 카브뉴의 전신이 진행했던 프로젝트를 포함해 전용도로를 포함하는 스마트시티 건설도 다수가 추진되고 있다.
CAV-C 프로젝트는 지역의 다른 자율주행 시험센터의 경우처럼, 카브뉴와 미시간대학, 그리고 포드가 사업을 주도한다. 특히 프로젝트는 상당히 치밀하게 진행되고 있는데, 예를 들어 타당성 조사만 2년을 잡고 있다.
SIP는 토론토에서 “캐나다는 구글의 실험용 쥐가 아니다”, “구글의 스마트시티 사업은 감시 자본주의의 식민지 실험”이란 지역주민과 짐 발실리(전 블랙베리 최고경영자)와 같은 유력 인사의 비난을 받으며 좌초한 사이드워크 랩스의 재탕을 원치 않고 있다. 때문에 미시간, 디트로이트 지역과 전통적인 자동차 산업, 관련 서드파티와의 적극적인 협력이 필요했다.
카브뉴는 프로젝트를 설명하는 제안서를 ‘웹사이트’에도 게재했다. 경쟁 입찰을 통해 선정된 카브뉴는 모든 인프라, 기술기업을 대상으로 적용할 수 있는 혁신을 실험하면서, 소유, 운영, 투자하겠다고 선언했다.
특히, 프로젝트의 자문위원회에는 포드, GM, BMW, 혼다, 토요타, 아르고 AI, 어라이벌, 웨이모, 투심플(TuSimple) 등 카 메이커와 관련 자율주행 모빌리티 기업들로 구성됐다. 또한, 많은 OEM이 포함된 SAE ITC의 ‘Automated Vehicle Safety Consortium’과 같은 컨소시엄과 협력하는 것을 포함해 표준 및 상호운용성에 관한 다양한 OEM 참여 협의 프로세스를 수립할 방침이다.
SIP는 미시간 주지사, 디트로이트 시장, 카 메이커의 동의를 끌어냈다. 예를 들어, 마이크 듀건(Mike Duggan) 디트로이트 시장은 “5년 전 자동차 산업의 미래는 실리콘밸리로 가고 있었지만 이곳에서 웨이모, 포드, 피아트 크라이슬러, GM 등의 전기차, 자율주행차 투자가 이뤄지며 이것이 바뀌고 있다는 것을 말해주고 있다”며 “차세대 모빌리티 개발에 앞장서려면 ‘실행 위주의 민관협력이 있어야 한다”고 말했다. 디어본의 데비 딩겔(Debbie Dingell) 하원의원은 “코로나19 상황이라고 중국, 인도, 유럽이 멈추지 않는다. 우리도 멈추지 않을 것”이라고 말했다.

2018년 디트로이트에서 진행된 DERQ와의 DSRC 기반 V2I 프로젝트.
그레첸 위트머 미시간 주지사(Gretchen Whitmer)는 “차를 만들던, 인프라를 개선하는 것이던, 에코시스템을 창조하는 것이던 우리는 미시간이 미국 자동차 산업의 리더임을 명확히 하고 싶다”고 말했다.
그들은 이 프로젝트가 미시간 모빌리티 2045(Michigan Mobility 2045)의 하이라이트이자 초석이 될 것이며, 이해관계자들의 목표에 부합하는 혁신적인 결과를 달성할 수 있을 것이라고 자신하고 있다. 안전성 개선, 카 메이커 간 중립성 달성, 접근성 향상, 지역 계획과의 연계 등을 포함하는 핵심 원칙과 정책 목표를 달성하고 혁신, 연구개발, 경제개발, 개방형 데이터 액세스 및 공유 학습, 사이버 보안 등을 촉진할 것으로 자신했다.
SIP는 CAV의 규모와 효율적 채택을 가속화하고 AV를 보다 더 잘 활용할 수 있는 인프라 개발 투자가 거의 이뤄지지 않은 점을 강조하면서, 예를 들어 신호 및 교통신호를 감지하기 위한 카메라나 라이더와 같은 온보드 센서의 이용이 이같은 정보를 도로 인프라에서 직접 전달받음으로써 더욱 향상될 수 있다고 말했다. 또 그들은 인프라가 진화하고 있지 않기 때문에 인프라 또는 V2X에 대한 카 메이커의 지지부진한 투자 상황을 프로젝트를 통해 타개할 수 있다고 했다.
특히, CAV 인프라 이익과 이 분야에 대한 투자 부족을 감안할 때, 관할당국이 CAV를 위한 인프라 우선순위를 정할 강력한 필요와 기회가 있고, 500마일의 도로와 미국 최대 규모의 V2I 기술 보급을 포함하는 첨단 인프라 투자 기회가 미시간 교통부(MDOT)의 리더십에 달려있다고 강조했다.
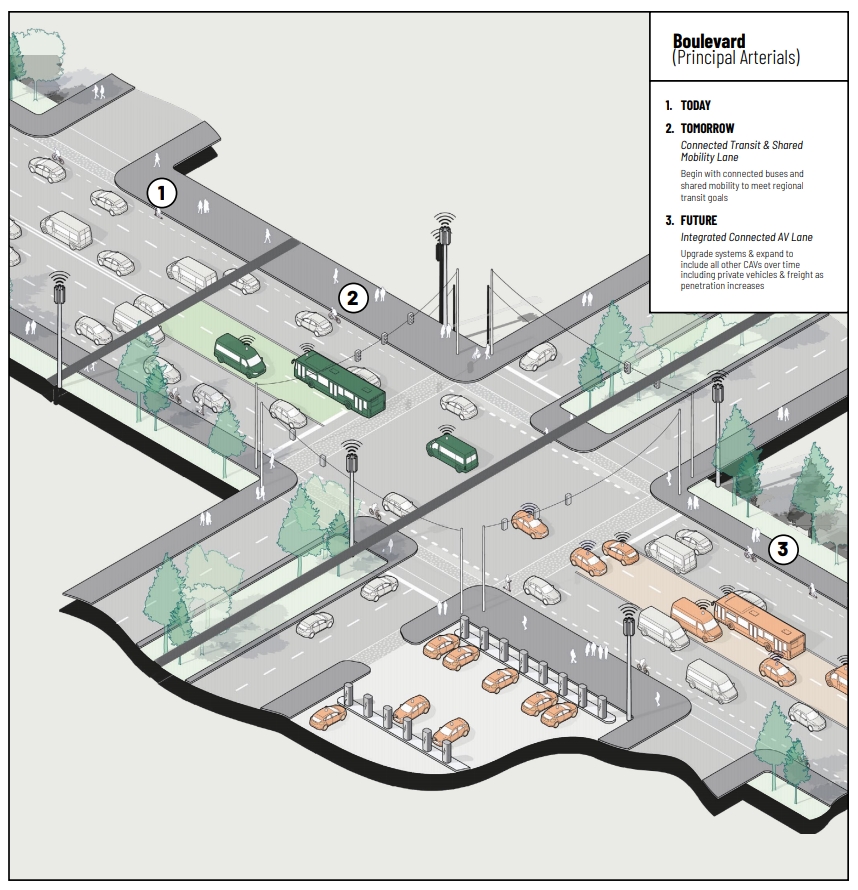
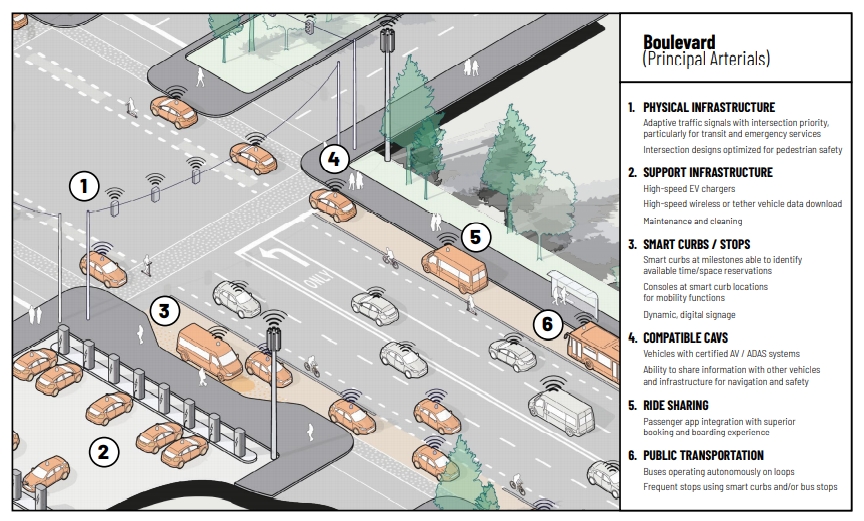
CAV-C 전용차로의 현재, 내일, 미래(도심대로). 사이드워크 인프라스트럭처 파트너스는 자율주행 인프라 프로젝트를 위한 새 자회사 ‘카브뉴(Cavnue)’를 설립했다. 미시간주와 손잡고 자율주행-커넥티드 카를 위한 40마일(64 km), 디트로이트와 앤아버를 잇는 94번 도로에 전용차로를 만드는 CAV-C 프로젝트에 착수했다.
셔틀 버스부터
SIP는 이 전용차로가 20세기에 고속도로 시스템이 주요 교통을 형성한 것처럼 21세기의 교통을 형성하는 동시에 ‘미래에 대비하는’ 새로운 기반시설을 위한 시작 솔루션이 될 것이라고 했다.
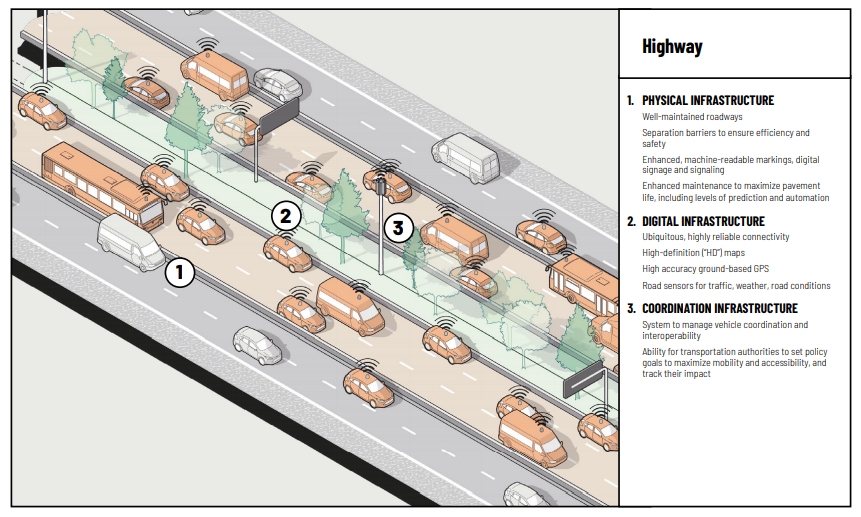
커넥티드 카 및 자율주행차를 위한 CAV-C 프로젝트는 안전하고 효율적이며 적응 가능한 모빌리티 옵션을 위한 실제 모델로, 이같은 차량의 보급과 지원 인프라의 사용을 촉진하는 것을 목표로 한다. 프로젝트는 물리적 인프라, 디지털 인프라, 코디네이션 인프라, 운영 인프라를 결합해 최종적인 CAV 전용도로를 목표로 한다. 하나 이상의 커넥티드 카를 서로 연결하고 도로 환경의 디지털트윈을 만들며, 궁극적으로 하위 기술 수준의 자율주행차도 높은 자율주행 성능을 발휘할 수 있도록 만든다.
CAV-C는 미국 곳곳에서 자율주행 버스가 테스트되고 있는 것처럼, 일차적으로 전용차선 도입이 BRT나 LRT과 같은 기존 대중교통 서비스, 환승 서비스와 비교할 때 더 높은 안전성, 처리량, 시스템 수준의 효율성을 제공할 수 있는 자율주행 셔틀 서비스 도입을 목표로 한다. 즉, 전용차로의 구현은 기존 미시간 동남부 지역 교통계획 제안을 기반으로 하는 기존 BRT 개념에 따라 구축돼, 시간이 지남에 따라 미래를 위한 추가 인프라 투자로 진화하고 확장될 예정이다. 결과적으로 이 도로는 공유이동성, 대중교통, 화물, 승용차 등 다른 자율주행 유형들을 포함할 것이고, 최소한의 표준을 충족시키는 차량만 포함하게 될 것이다.


전용차선
CAV-C의 미래는 V2X 개념의 연장선이다. CAV가 분리돼 운영되는 ‘분리된 미래’는 CAV가 협력되지 않으며, 특정 수송 문제를 악화시킬 수 있다. 자율주행과 그렇지 않은 교통이 혼재하는 상황은 그에 상응하는 도로 용량 증가 없이 유도된 수요를 포함해 의도하지 않은 결과를 초래할 수 있고, 잠재적으로 교통혼잡과 제한된 도로 용량의 문제를 양산할 것이다. 비통합 통신 표준과 데이터 관리는 협력제동이나 교차로 교통 최적화 등과 같은 중요한 애플리케이션의 채택을 방해할 것이다.
반면, ‘통합된 미래’의 인프라는 다양한 모빌리티 과제를 해결하기 위해 CAV의 효율적이고 확장된 보급을 지원할 수 있다. 유비쿼터스, 표준화된 연결성이 더 많은 컴퓨팅 자원과 결합해 차량 자체와 인프라 간의 실시간 및 안전한 정보 공유를 가능하게 한다. 예를 들어, 이를 통해 주변 사고에 대해 CAV에 사전 경고할 수 있고, 혼잡을 최소화하기 위한 특정 모드의 신호 우선순위를 부여하거나, 비상 차량에 우선순위를 부여할 수도 있다.
CAV-C는 우선 인프라 시스템을 결합한 CAV 전용차선을 만들 것이다. 전용차선의 권리는 컷인(cut-in)을 줄이고 다른 문제들을 없애는 것과 같은 수많은 이점을 준다. 전용차선은 높은 수준의 협력주행을 지원한다. 협력은 이동의 실행(예: 조향 및 제동)과 공유자원(예: 교차로)의 사용을 최적화하기 위해 차량 그룹 간의 지능적이고 공유된 의사결정이다.
또 OEM 중립적인 방식으로 설계된 개방형 표준으로 도로 사업자들이 주요 공공정책 목표를 달성할 수 있고, 자율주행 BRT, 온디맨드 공유 모빌리티를 더 잘 수용할 수 있다.
프로젝트는 장기적인 운송이 필요한 파트너에게 서비스를 제공하고 대규모 고정비용 투자 (예: 주차 및 통근)를 줄임으로써 중기적인 추가 수요를 창출해 활용도를 높일 것이다. 또 전통적인 BRT는 전용차선을 비효율적으로 만들지만 CAV-C는 핵심 운송 서비스를 희생시키지 않으면서 추가 차량 및 폼팩터에서 중요한 미사용 공간을 활용할 수 있게 만든다. 호환 가능한 CAV에 대한 액세스 제공은 이런 공간에 대해 동적요금 부과를 가능케 해 도로사용에 대한 추가 수익을 창출할 것이고, 이는 CAV의 보급 증가와 함께 장기적인 수익원이 될 것이다.
프로젝트는 고속도로나 주요 도로를 개선하기 위해 기존 차선을 CAV 전용으로 지정하거나 기존 인프라에 새로운 CAV 차선을 추가함으로써 제공된다. 차량 밀도가 높아지고 차선이 좁아지는 것은 물론, 평균 운전속도가 높아져 도로 처리량이 증가할 것이다.
CAV-C는 미국 곳곳에서 자율주행 버스가 테스트되고 있는 것처럼, 일차적으로 전용차선 도입이 BRT나 LRT과 같은 기존 대중교통 서비스, 환승 서비스와 비교할 때 더 높은 안전성, 처리량, 시스템 수준의 효율성을 제공할 수 있는 자율주행 셔틀 서비스 도입을 목표로 한다.
시스템 개발
메인 개발자는 CAV-C 프로젝트를 촉진하는데 필요한 동급 최강의 하드웨어, 소프트웨어 및 운영요소를 결합하는 시스템 통합자다. 이 솔루션은 전체 CAV-C 기술 스택을 구성하는 4개의 레이어로 구성되는데, 이는 물리적 도로 확장, 센서 및 커넥티비티를 포함하는 디지털 시스템 설치 및 통합, ‘디지털 트윈’ 시스템 환경을 실시간으로 표현하고 CAV 주행을 조정하는통합, 공유이동성 시스템과 같은 운영 인프라 구축 등이다.
이 기술의 비전은 적응형 신호등과 같은 중요 하위 구성요소의 채택 수준을 뛰어 넘는다. 안전성을 높이고 교통혼잡을 줄이며, 대중교통의 접근성과 비용 효율성을 향상시키는 통합된 접근방식을 제공한다.
미시간 주정부는 디트로이트와 앤아버 사이 기존 도로에서 우선 6개월간 자율주행차를 시범 운행하고, 2년간 1단계인 ‘타당성 분석’을 거쳐 일부 구간에서 자율주행차 전용차선제를 운영한 뒤 이를 대폭 확대 실시할 예정이다.
2021년 1월 현재 프로젝트는 여전히 적용할 통신기술을 포함해 여러가지 문제를 조율 중이다.
미시간주의 트레버 파울(Trevor Pawl) 모빌리티 책임담당관은 DSRC와 5G 적용 관련 질문에 "여전히 결정하지 못했지만 두 가지 기술 모두를 쓸 것이라고 예상한다"고 말했다.
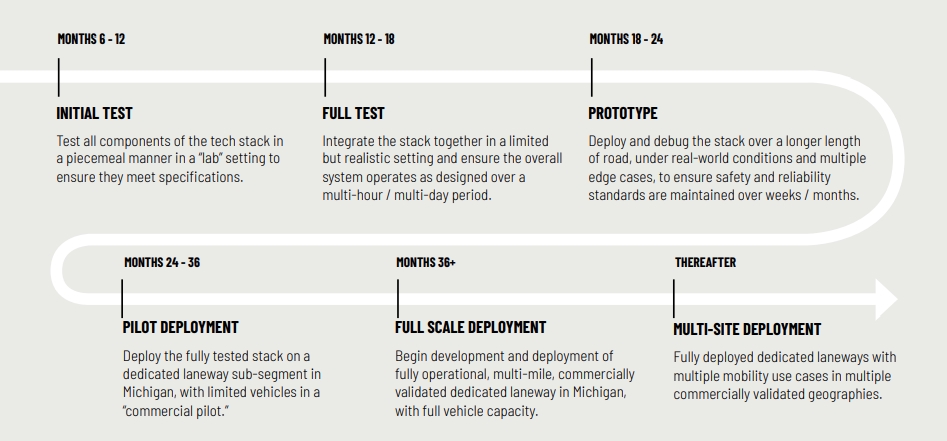 CAV-C 프로젝트 일정
CAV-C 프로젝트 일정
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>
 PDF 원문보기
PDF 원문보기
