2008-06-27 / 06월호 지면기사
/ 글|한네스 이스틀 (Hannes Estl), 시스템 엔지니어, 텍사스 인스트루먼트
12 V 자동차 보드 넷의 폭넓은 전압 변동은 자동차 전자 애플리케이션에 다소 문제가 될 수 있다. 3.5 V에서 28 V(45 V)까지 폭넓게 변하는 전압 범위에서는 리니어 전압 레귤레이터, 벅 또는 부스트 DC/DC 컨버터 등의 단순한 전원공급 솔루션이 대상 ECU(Electronic Control Unit)의 전원 전압을 공급하는데 늘 적절한 것은 아니다. 벅 부스트 컨버터 토폴로지는 자기결합 코일(SEPIC 또는 플라이백 컨버터와 같은 트랜스포머)을 사용하지 않고도 이와 같은 딜레마를 해결할 수 있으며, 비용 효율적이고 유연한 시스템 솔루션을 제공할 수 있다.
자동차 환경에서 많은 애플리케이션과 ECU에 배터리나 알터네이터(alternator, 교류발전기)로 전압을 직접 제공하는 것은 적절치 않다. 먼저 적절한 전압 레벨로 변환되어야 한다. DC/DC 스위칭 전압 레귤레이터와 리니어 전압 레귤레이터는 그 목적으로 널리 사용되는 솔루션이다. 리니어 솔루션은 공급된 입력 전압보다 더 높은 출력 전압을 생성하는데 사용될 수 없기 때문에, 이 글은 스위칭 전압 레귤레이터에 초점을 맞출 것이다.
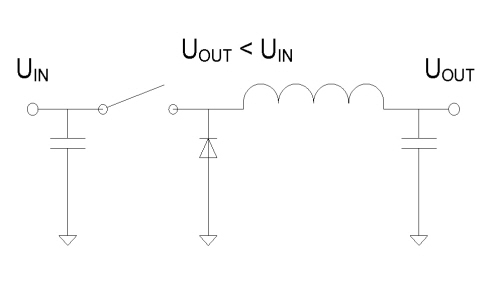
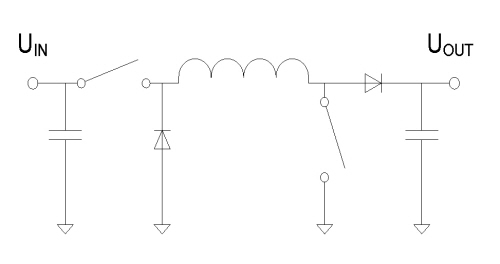
가장 흔한 토폴로지는 그림 1과 같은 벅 컨버터이다. 벅 컨버터는 단일 인덕턴스, 다이오드, 스위치만을 요구하기 때문에 가장 간단하고 비용 효율적인 스위칭 DC/DC 솔루션이라 할 수 있다. 그러나 결함도 있다. 입력 전압보다 더 적은 출력 전압만 생성하는 제한이 바로 그것이다. 고출력 대비 입력 전압이 요구되는 경우, “역(inverse)” 토폴로지나 부스트 컨버터를 사용할 수 있다(그림 2). 토폴로지는 유사한 부품을 요구하지만 입력 전압보다 더 우수한 출력 전압을 제공한다.
 [그림 1] 기본 벅 컨버터
[그림 1] 기본 벅 컨버터
자동차 보드 넷 전압은 폭넓은 범위 내에서(크랭킹 동안 3.5V로 낮고, 클램프 부하 덤프 경우에 최고 45V) 달라질 수 있기 때문에, ECU 애플리케이션에서 입력 및 출력 전압 레벨의 크로스오버는 꼭 필요하다. 엔진의 시동을 거는 크랭킹 동안에, 기능 손실이 있어서는 안된다. 특히 파워트레인 애플리케이션이나 일부 내비게이션과 인포테인먼트 시스템의 경우가 그렇다. 플라이백 컨버터나 SEPIC 토폴로지와 같은 솔루션으로 해결될 수 있는 문제이긴 하나, 트랜스포머 유형의 인덕턴스를 갖추기 위해 비용이 추가적으로 들며 공간 또한 차지하므로 그다지 매력적이지 않다.
입력 전압이 출력 전압 값을 지나친다고 해도, 일정한 출력 전압뿐만 아니라 단일 코일만을 갖춘 간단한 설계를 제공할 수 있는 솔루션은 벅 부스트 토폴로지이다. 이것은 하나의 토폴로지에서 벅 컨버터와 부스트 컨버터를 결합시킨다. 2개의 다른 모드 간의 간단한 트랜지션은 모든 입력 전압 조건에서 안정적이며 무정전 출력 전압을 가능하게 한다.
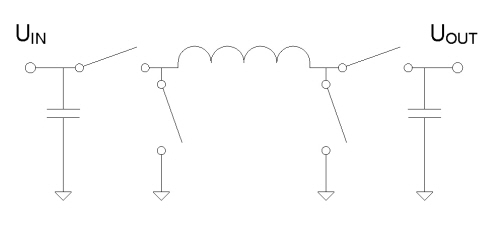
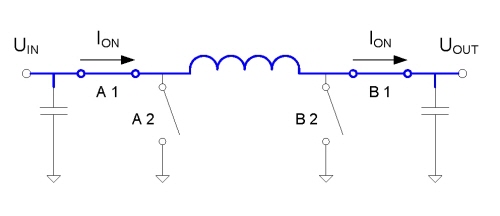
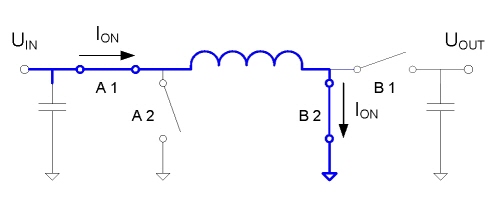
2개의 다른 토폴로지가 결합되기 때문에 스위치 2개와 다이오드 2개가 비동기식 벅 부스트 컨버터를 위해 필요하다(그림 3). 간단한 벅 또는 부스트에 대해 하나의 스위치와 하나의 다이오드가 대응할 수 있다. 전체 시스템의 효율성을 높이기 위해 2개의 다이오드는 스위치로 대체될 수 있다. 토폴로지는 인덕터를 갖춘 풀 H 브리지와 유사하게 보인다(그림 4).
[그림 3] 비동기식 벅 부스트 컨버터
[그림 5] ON 위상 동안 벅 컨버터 전류 흐름
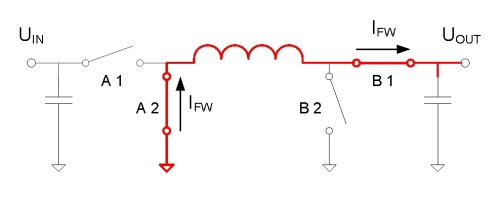
[그림 6] 프리 휠링 위상 동안 벅 컨버터 전류 흐름
비동기식 토폴로지에서, 스위치 A2는 수동적인 프리 휠링 요소로써 다이오드와 대체된다. 이것은 필수 드라이버와 FET의 수를 감소시키지만 컨버터의 효율성을 저하시킨다. 이 동작에서 스위칭 듀티 사이클은 식 1과 같이 입력-대-출력 전압 비율에 따라 달라진다.
UOUT/UIN = tON/tON+tOFF = tON/TS = D
부스트 모드 동작
부스트 모드 동작의 경우에 입력 전압은 항상 출력 전압 미만이 되어야 한다. 이 디바이스는 기본적인 부스트 토폴로지에서 동작한다. 컨버터의 벅 스위치(A1, A2)는 이 모드에서 스위칭 되지 않는다. 스위치 A1은 입력에서 인덕터로 전류를 흐르게 하기 위해 닫힌다. 스위치 A2는 입력에서 GND로 단락을 피하기 위해 개방되어야 한다.
“ON 타임” 동안 스위치 B2는 인덕터를 충전하기 위해 닫히게 된다(그림 8). 이 주기에서 이 전류는 스위치 A1, 코일, 스위치 B2를 통해 입력에서 GND로 흐른다.
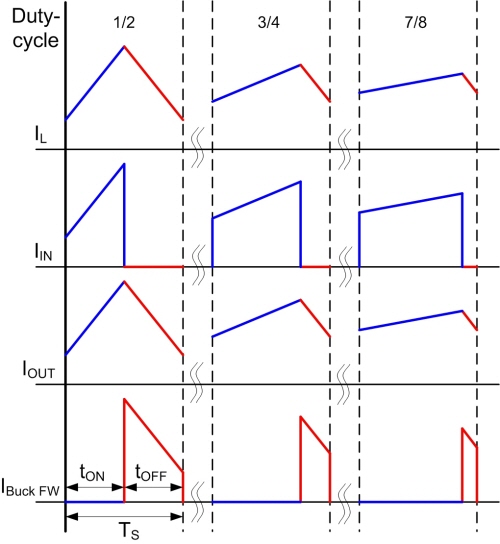
[그림 7] 벅 스위칭 위상 동안의 전류 파형
 [그림 8] ON 위상 동안 부스트 컨버터 전류 흐름
[그림 8] ON 위상 동안 부스트 컨버터 전류 흐름
이 주기(OFF 시간)의 2차 위상에서 스위치 B2는 개방되며, 스위치 B1은 폐쇄된다(그림 9). 자기전하 코일은 스위치 A1, 코일, 스위치 B1을 통해 입력에서 출력 커패시터로 전류를 흐르게 한다.

[그림 9] 프리 휠링 위상 동안 부스트 컨버터의 전류 흐름
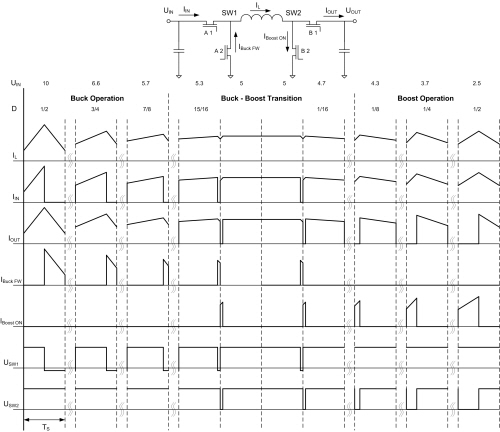
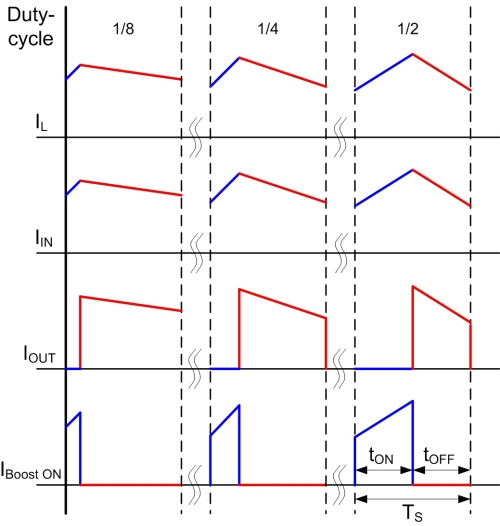
[그림 11] 다른 스위칭 위상 및 동작 모드 중에 전류 및 전압 파형
비동기식 토폴로지의 경우, 스위치 B1은 수동적 프리 휠링 요소로써 다이오드와 교체된다. 그 결과는 “벅 모드 동작”일 때 설명한 것과 동일하다. 이 동작에서 스위칭 듀티 사이클은 입력-대-출력 전압 비율에 따라 달라진다(식 2).
UOUT/UIN = tON+tOFF/tOFF = TS/TS-tON = 1/1-D
트랜지션 동작
입력 및 출력 전압이 거의 동일할 때, 기본 벅 모드나 기본 부스트 모드는 홀로 안정적인 폐쇄형 루프 제어 출력 전압을 유지할 수 없다. 단, 전압 레벨이 일정할 때는 하나의 모드에서 또 다른 모드로 변경되기 때문에 가능하다(이 경우, 문턱전압은 안정성을 위해 히스테리시스를 갖는다). 벅 및 부스트 모두에서 동작될 때는 안정적인 출력 전압뿐만 아니라 우수한 과도 응답을 보장하기 위해 스위칭 클록 사이클이 변경된다.
결론
콜드 스타트 조건, 로드 덤프, 배터리 완전 방전 등을 포함하여 넓은 12 V 보드 넷 전압 범위의 문제를 처리할 수 있는 다양한 제품을 여러 회사로부터 이용할 수 있다. 예를 들면 완전 통합형 5 V, 1 A 벅 부스트 컨버터 TPIC74100은 부피가 큰 트랜스포머 유형의 인덕턴스가 없어도 안정적인 출력 전압을 유지할 수 있다. 따라서 광범위한 배터리 전압 조건에서도 전체 애플리케이션 동작을 보장한다.
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>