라이다 기술은 로봇과 자율 시스템이 다양한 환경에서 사물을 감지하고 반응하고 안전하게 작동하는 방식을 지속적으로 발전시키고 있다. 이 기술은 수십 년 전부터 존재했지만, 최근 기술 혁신을 통해 자율이동로봇(Automated Mobile Robot, AMR)에도 본격적으로 적용되기 시작했다.
 그림 1. LiDAR를 통해 탐색하는 AMR
그림 1. LiDAR를 통해 탐색하는 AMR
자동차에서 인간처럼 지각이 있는 인간형 로봇으로 변신하는 로봇이 등장하는 유명한 영화 시리즈가 있다. 그러나 현실의 로봇은 아직 그 정도 수준의 지각 능력을 갖추지 못했으며, 예측할 수 없는 장애물이 가득한 곳을 이동하기 위해서는 카메라를 눈처럼 사용해야 한다.
자동차에서는 차량, 승객, 보행자의 안전을 보장하기 위해 카메라뿐 아니라 가능한 모든 탐지 방식을 갖추는 것이 왜 유리한지 쉽게 이해할 수 있다. ‘센서 퓨전(sensor fusion)’이라 불리는 센서 모듈 통합 방식을 적용하면 라이다, 레이다, 카메라와 같은 다양한 탐지 방식을 동시에 활용해 거리와 속도를 측정할 수 있다. 차량은 센서 퓨전을 통해 주변 환경을 더 정확하게 이해하고 장애물을 식별할 수 있다.
로봇 분야에서도 라이다 기술의 발전은 카메라 기반 시스템의 한계를 보완하고, AMR의 도입 가능성을 높이고 환경 인식·장애물 감지·실시간 대응 능력을 향상시킨다.
차량용 라이다와 산업용 라이다
상용차에서는 차량 상단이나 섀시 측면에 기계식 스캐닝 라이다가 장착돼 있는 것을 볼 수 있다(그림 2). 하키 퍽 정도 크기의 라이다 모듈은 모듈당 32채널에서 128채널을 포함하며, 0.2초 만에 360도를 회전한다. 광학 ToF(Time of Flight) 아키텍처와 ADC(아날로그-디지털 컨버터) 기반 시스템을 통해 각 라이다 모듈은 채널별로 풍부한 정보를 얻을 수 있지만, 높은 전력 소비와 큰 크기가 단점이다.
 그림 2. 섀시 위쪽 중앙에서 기계적 스캔을 수행하는 LiDAR 모듈
그림 2. 섀시 위쪽 중앙에서 기계적 스캔을 수행하는 LiDAR 모듈
ADC를 탑재한 라이다 모듈은 정보를 3차원 또는 4차원 포인트 클라우드로 생성할 수 있어 흔히 3D 또는 4D 라이다로 불린다. 산업용 라이다는 동일한 원리를 이용하지만, 모듈당 채널 수가 훨씬 적으며, 때로는 단일 채널만을 갖기도 한다. 복잡성과 크기가 줄어든 덕분에 산업용 모듈은 비용과 전력 소모가 낮아 로봇 설계에 통합하기가 용이하다. 산업용 라이다 시스템은 2D 포인트 클라우드 또는 1D(1차원)의 거리 측정 기능을 제공하며, 각각 2D 또는 1D 설계로 분류된다.
산업용 라이다는 교통량 모니터링, 항만 및 터미널 모니터링, 물류창고 내 탐색, AMR, 자율 산업차량, 스마트폰 및 태블릿과 같은 개인용 전자기기까지 폭넓게 활용된다.
라이다가 로봇에 제공하는 가치
AMR이 다양한 장소에서 보다 독립적으로 운영되기 시작하면서, 카메라만으로는 충분하지 않은 상황이 늘고 있다. 예를 들어 배달용 AMR이 주택가 보도를 따라 이동할 때 주변에는 자동차, 쓰레기통, 보행자, 자전거, 어린이 장난감 등 다양한 장애물이 있을 수 있으며, 이것이 로봇의 이동에 직접적인 영향을 줄 수 있다.
AMR은 이러한 장애물을 감지하고, 잠재적 위험을 평가하고, 실시간으로 적절하게 반응하는 것이 중요하다. 라이다 모듈은 AMR이 이동 경로로 굴어 들어오는 공과 같은 돌발 상황을 탐지해 빠르게 대응할 수 있는 해상도와 응답 속도를 제공한다. 그림 3은 라이다를 장착한 AMR이 혼잡한 인도를 따라 이동하는 것을 보여준다.
 그림 3. 야외에서 탐색하는 AMR
그림 3. 야외에서 탐색하는 AMR
카메라는 고해상도의 이미지를 제공하지만, 거리 측정에는 한계가 있다. 반대로 라이다는 정확한 거리 정보를 제공해 AMR이 계속 진행할지, 경로를 변경할지를 판단하는 데 중요한 근거를 제공한다. 또한 라이다는 다양한 밝기 조건과 기상 조건에서도 안정적으로 작동하며, 카메라 기반 시스템과 달리 외부 조명도 필요 없다.
라이다 통합 가속화
라이다의 장점이 명확해지면서, 설계 엔지니어는 이 기술을 시스템에 효과적으로 통합하는 방법을 고민해야 한다. 우선 송신 경로에는 레이저 드라이버 회로를, 수신 경로에는 라이다 광학 설계의 수신 신호를 처리하기 위한 트랜스임피던스 증폭기(transimpedance amplifier, TIA)를 설계해야 한다(그림 4 참조).
예를 들어
LMH34400과 같은 TIA를 사용하면 포토다이오드와 시간-디지털 컨버터(time-to-digital converter, TDC) 사이를 단일 칩으로 구현할 수 있고, TLV3801과 같은 고속 비교기와 조합하는 방식도 가능하다.
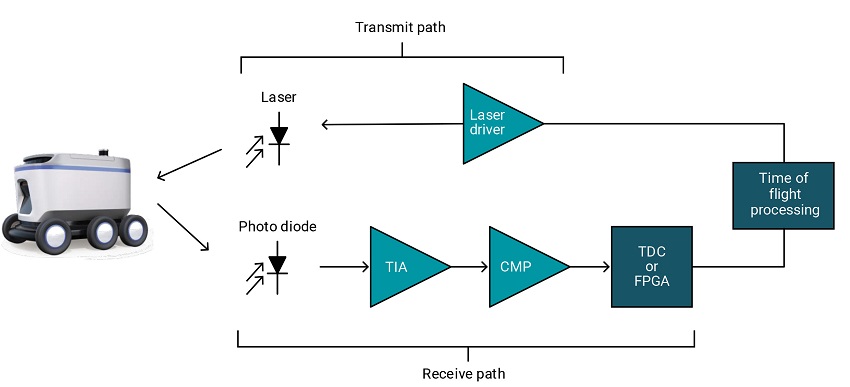 그림 4. LiDAR 광학 신호 체인 블록 다이어그램
그림 4. LiDAR 광학 신호 체인 블록 다이어그램
송신 경로에서는
LMH13000 통합 레이저 드라이버가 연속 모드와 펄스 모드에서 모두 고출력 전류 구동을 제공해 추가 부품을 최소화한다. 이 LVDS(low-voltage differential signaling) 제어 전류 소스는 온도 변화에 따른 펄스 변화율을 2% 이내로 유지하고 800ps의 상승·하강 시간과 최대 250MHz 주파수를 지원한다. 펄스 전류 모드에서는 50mA~5A의 출력 전류를 제공한다.
좁은 펄스폭과 고출력 전류 구동의 조합을 통해 더 높은 출력의 펄스를 생성할 수 있으며, 이는 거리 측정 범위를 최대 30%까지 늘릴 수 있다. 이 모든 과정은 안구 안전 기준을 충족하면서 이루어진다. 이를 통해 로봇은 장애물을 더 빠르고 정확하게 탐지해 복잡한 환경에서도 더욱 안전한 실시간 의사결정을 내릴 수 있다.
결론
라이다는 자동차와 산업용 차량에서 자율성을 구현하기 위한 핵심 기술이다. 물체를 실시간으로 감지하고 충돌을 피할 수 있는 능력은 차량과 사람 모두의 안전을 향상시킨다. 가까운 미래에는 영화에서나 보던 자율 로봇을 주위에서 흔히 보게 될 것이다.
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>





