FEV는 운송 업계의 주요 조직과 자율주행 기능을 조종, 평가 및 테스트하기 위한 종합적인 방법론을 제공하기 위해 기획된 프로젝트에 참여하고 있다고 최근 밝혔다. 이 프로젝트는 2017년 9월에 시작됐으며 유럽연합의 Horizon 2020 연구 및 혁신 프로그램으로부터 자금 지원을 받았다.
FEV는 유럽 연구 프로젝트인 L3Pilot에서 자율주행 기능을 개발, 테스트 및 평가하는 데 사용되는 방법을 발전시키기 위해 협력하고 있다. 이 프로젝트의 주요 목표는 △사용자 관점에서 자동화 기능의 기술, △연구 가설 및 로깅 요구사항 제공, △실험 절차 개발, △파일럿 측면에서 이러한 절차를 실행하기 위한 지원, △모든 평가 영역에 대한 방법론 정의 등이다.
FEV의 ADAS(advanced driver assistant systems) 및 AD(automated driving systems) 개발 담당 선임 그룹이사인 엘마르 뵈르너(Elmar Boerner)는 “프로젝트의 범위는 SAE 레벨 3 자율주행 기능에 초점을 맞추고 있으며 조건부 레벨 4 기능이 추가됐다”면서 “우리의 핵심 목표는 자동화된 시스템 기능이 다양한 조건에서 성능이 일관되고 신뢰할 수 있으며 예측 가능한지 확인하는 것”이라고 말했다.
프로젝트의 일환으로 FEV는 아헨(Aachen), 쾰른(Cologne), 뒤셀도르프(Düsseldorf) 인근에서 FEV의 자체 프로토타입 스마트 차량을 이용한 고속도로 테스트를 실시하여 교통혼잡자동운전(traffic jam chauffeur) 기능 등을 평가하고 있다. TÜV 라인란드의 철저한 평가에 이어, FEV는 쾰른 지방정부로부터 자체 개발한 교통혼잡자동운전 기능을 활성화해 사전 정의된 공공도로에서 시범 차량을 최대 시속 60 km(약 37mph)의 속도로 운행할 수 있는 승인을 받았다. 이를 통해 고속도로 자율주행(highly automated driving, HAD) 기능의 완성도를 한층 더 높이고 실제 상황에서 중요한 데이터를 수집할 수 있게 되었다.
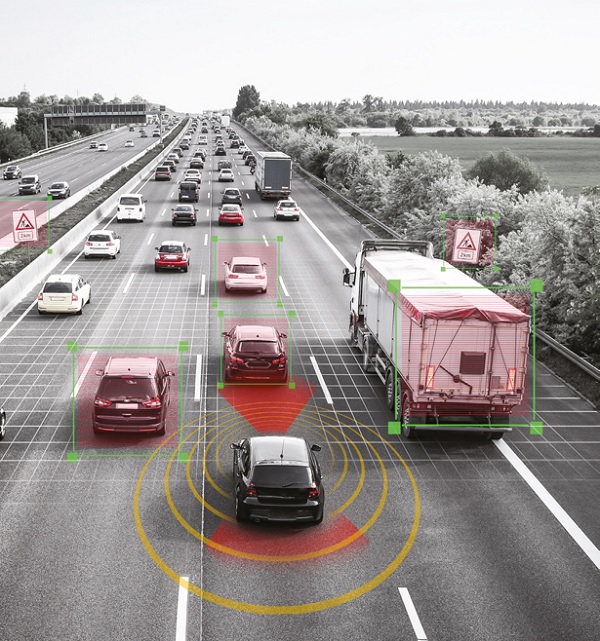 L3-Pilot 프로젝트의 일환으로 FEV는 아헨, 쾰른, 뒤셀도르프 근처에서
L3-Pilot 프로젝트의 일환으로 FEV는 아헨, 쾰른, 뒤셀도르프 근처에서
FEV의 자체 프로토타입 스마트 차량에 대한 고속도로 테스트를 수행하여
교통혼잡자동운전 등의 기능을 평가하고 있다. <출처 : FEV 그룹>
이번 프로젝트 전반에 걸쳐 FEV는 사이버 보안과 데이터 로깅 측면에서도 깊이 관여하고 있다. 이 회사는 L3Pilot 파트너 사와 협력하여 레벨 3 자율주행 차량에 대한 사이버 보안 위협 분석을 수행했으며 사이버 공격으로부터 보호하기 위한 페일 세이프(fail safe) 절차 및 전략을 권고했다. 또한 FEV는 자율주행 기능의 검증 및 확인(verification and validation)을 위한 데이터 로깅 도구의 평가에 적극 참여했다. 이 평가는 OEM이 자율주행 검증에 사용할 로깅 시스템의 권고로 마무리되었다.
뵈르너는 “L3Pilot 프로젝트는 자율주행 기능의 개발, 테스트 및 검증에서 최첨단 기술을 발전시키기 위한 강력한 플랫폼을 제공한다. 이 프로젝트에서 얻은 교훈은 이미 가치가 있음이 입증됐으며 향후 몇 년 동안 자동화 기술이 지속적으로 발전함에 따라 더욱 중요해질 것이다”고 말했다.
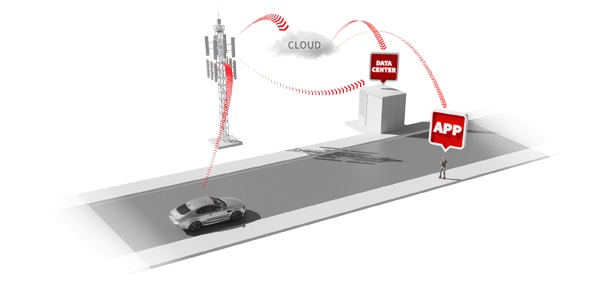 FEV는 OEM이 자율주행(AD) 검증에 사용할 로깅 시스템의 권고사항을 발표했다. <출처 : FEV 그룹>
FEV는 OEM이 자율주행(AD) 검증에 사용할 로깅 시스템의 권고사항을 발표했다. <출처 : FEV 그룹>
L3Pilot 프로젝트는 보조금협정 No 723051에 의거해 유럽연합의 Horizon 2020 연구 및 혁신 프로그램으로부터 3,600만 유로의 자금을 지원받았다. 2017년 9월부터 2021년 8월까지 48개월 동안 진행되는 이 프로젝트에는 오스트리아, 벨기에, 프랑스, ??핀란드, 독일, 그리스, 이탈리아, 네덜란드, 노르웨이, 스웨덴, 스위스, 영국 등 12개국에서 약 100대의 차량과 1,000명 이상의 운전자가 참여하고 있다. 이 프로젝트에 참여하고 있는 34개 협력사에는 폭스바겐, 아우디, FCA, BMW 그룹, 포드, 메르세데스-벤즈, PSA, 르노 그룹, 토요타, 혼다, 볼보를 비롯해 부품업체, 연구기관, 보험사 등이 포함되어 있다.
 FEV는 자체 프로토타입 스마트 차량의 고속도로 테스트를 실시하고 있으며,
FEV는 자체 프로토타입 스마트 차량의 고속도로 테스트를 실시하고 있으며,
교통혼잡자동운전 등의 기능을 평가하여 회사의 고속도로 자율주행 기능의 완성도를
한층 더 높이고 실제 환경에서 중요한 데이터를 수집한다. <출처: FEV 그룹>
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>





