2020-01-09 / 01월호 지면기사
/ 글│앤드류 맥로드(Andrew Macleod), 멘토 포트폴리오 자동차 마케팅 이사, 지멘스 디지털 인더스트리 소프트웨어
Integrated Circuit Design for New Mobility
칩-투-시티, 뉴 모빌리티를 위한 IC 설계
자율주행차의 성공 여부는 첨단 센서와 강력한 칩으로 구성된 시스템이 엄청난 양의 데이터를 실시간으로 처리할 수 있는 능력에 달려 있다. 이러한 칩들은 자율주행에 필요한 전력과 성능 및 면적 요건을 충족시키면서도 차량 내부의 혹독한 환경 조건에 견뎌낼 수 있는, 전례 없이 강력한 아키텍처를 필요로 한다. 이런 고급 시스템을 개발하기 위해 경쟁하고 있는 자동차 스타트업, 기존 OEM 및 시스템 업체들은 고급 설계 자동화 및 수명주기 관리 툴 제품군을 필요로 한다. 이러한 툴들의 요건은 맞춤형 디자인의 개발 가속화, 이제까지 서로 이질적이었던 기술 분야 전반에 걸친 작업 지원, 그리고 API 및 지속적인 통합을 통해 개방형 플랫폼 및 기술 기반의 생태계를 이용할 수 있도록 하는 것 등이 있다.
글│앤드류 맥로드(Andrew Macleod), 멘토 포트폴리오 자동차 마케팅 이사, 지멘스 디지털 인더스트리 소프트웨어
뉴 모빌리티에 요구되는 신기술
뉴 모빌리티란 사람과 물건을 한 장소에서 다른 장소로 옮겨주는 전통적인 이동수단에 파괴적 변화를 가져오는 일련의 기술들을 말한다. 여기에는 승차 공유 서비스, 도시 전역에 걸친 자전거 공유 프로그램, 전기 스쿠터는 물론, 커넥티드 자율주행 전기차도 포함된다. 후자는 그야말로 오랫동안 일반 대중과 기업 및 미디어의 관심을 받아왔는데, 이는 산업 분야와 사회에 대대적인 변화를 가져올 것으로 예상되기 때문이다. 지멘스는 아마도 이 분야에서 현재 및 미래의 거의 모든 운송 관련 업체들, 즉 자동차 제조업체와 티어 1, 기술업체, 모빌리티 서비스 제공업체 및 도시에 대한 세계 유일의 칩-투-시티(chip-to-city) 공급업체일 것이다.
커넥티드 자율주행 전기차는 자동차를 평가하고 사용하는 방법을 바꿔놓을 것이다. 특히 전기차와 자율주행차의 가치는 갈수록 더 기계적 측면보다는 전자장치에 의해 좌우되고 있다. 뉴 모빌리티 시대에는 중요한 전자장치의 디자인을 보유하고 최적화할 수 있는 회사가 더 많은 수익을 올리게 될 것이다. 때문에 전통적인 자동차 제조업체들이 전자 분야로 뛰어들고 있으며, 구글과 페이스북 같은 기술 업체들도 자동차 산업에 주목하고 있는 것이다.
자율주행차에 탑재되는 전자장치들을 생각해보자. 미국자동차공학회(SAE)는 자율주행차의 정교성을 0부터 5까지의 6단계로 규정하고 있다. 5단계 자율주행차는 50개 이상 첨단 센서로 구성된 네트워크를 사용해 주행 환경을 인식한다. 이 네트워크는 라이더, 레이더, 카메라 및 기타 센서들을 연결해 차선, 교통 표지판 및 신호, 기타 차량 및 보행자와 같은 차량 환경의 주요 특징들을 탐지해낸다. 이어서 일련의 집적회로(IC)가 매초마다 수집되는 기가비트 크기의 센서 데이터를 처리해 어떻게 반응할 것인지를 결정한다.
이 아키텍처는 융합돼 보다 크고 강력한 도메인 컨트롤러 시스템 온 칩(SoC)들이 CPU(중앙처리장치)에 연결되며, 이 모두가 인공지능을 구현하게 된다. 지금까지 많은 자율주행차 프로그램에서 데이터센터나 PC 애플리케이션용으로 설계된 CPU와 GPU가 이러한 도메인 컨트롤러 및 중앙 프로세서로 사용돼 왔다. 이러한 솔루션은 초기의 시험 및 개발 과제에서는 잘 작동했지만, 진정한 자율주행차용 SoC에 요구되는 전력, 성능 및 면적 요건을 충족시킬만한 역량은 갖추지 못했다. 칩 디자이너들은 이러한 요건을 충족시키기 위해서는 인공지능, 머신러닝 및 정보처리 기술을 중심으로 개발된 새로운 실리콘 및 시스템 아키텍처가 필요함을 깨닫고 있다.
이처럼 엄격한 요건을 충족시킬 수 있는 맞춤형 SoC를 개발하는 것은 자율주행차 프로그램이 상업적 성공을 달성하기 위해 극복해야 하는 가장 까다롭고 중요한 과제 중 하나다. 이러한 칩들은 환경 내에서 차량이 나아갈 방향을 안전하고 신뢰성 있게 찾아나갈 수 있는 능력이 자율주행차 시장의 주요 차별화 요소가 될 것이다. 가장 안전하고 신뢰성 있는 시스템이 대중으로부터 가장 큰 신뢰를 얻어 시장에서도 가장 선호될 것이다. 첨단 IC 설계 및 검증 솔루션은 기업들이 SoC 설계를 실현해 검증하고, 제조 후 수율을 극대화하며, 긴 제품수명 기간 동안 신뢰성이 보장되도록 지원할 수 있다.
차량용 IC의 설계주기 가속
SoC 디자이너들이 자율주행차의 고성능 및 저전력 요건에 부응하기 위해서는 인공지능 알고리즘에 최적화된 맞춤형 실리콘 아키텍처를 개발해야 한다. 기존의 설계 방법론을 이용할 경우, 설계의 복잡성과 검증시간이 증가해 너무 오랜시간이 소요된다. 많은 기업들이 시간과 인력 투자를 줄이기 위해 생산성과 설계 품질을 높이는 동시에 타임 투 마켓을 앞당길 수 있는 검증된 솔루션을 찾고 있다. 상위수준합성(HLS)에 대한 관심이 커지고 있는 것은 이 때문이다.
HLS는 SystemC나 C++로 작성된 설계 기능을 상위수준기술(high-level descriptions)을 가지고 RTL로 합성한다. 보다 높은 추상화 수준에서 설계하면 칩 기능의 사양과 구현을 분리해 초기 설계의 완성을 앞당길 수 있다
(그림 1). 설계자는 칩이 어떤 기능을 수행해야하는 지만 기술하면 되며, 그러한 기능을 어떻게 달성하는지 깊이 파고들 필요가 없다. 그러고 나면 HLS 툴이 RTL을 자동생성해 기술된 기능을 구현한다.
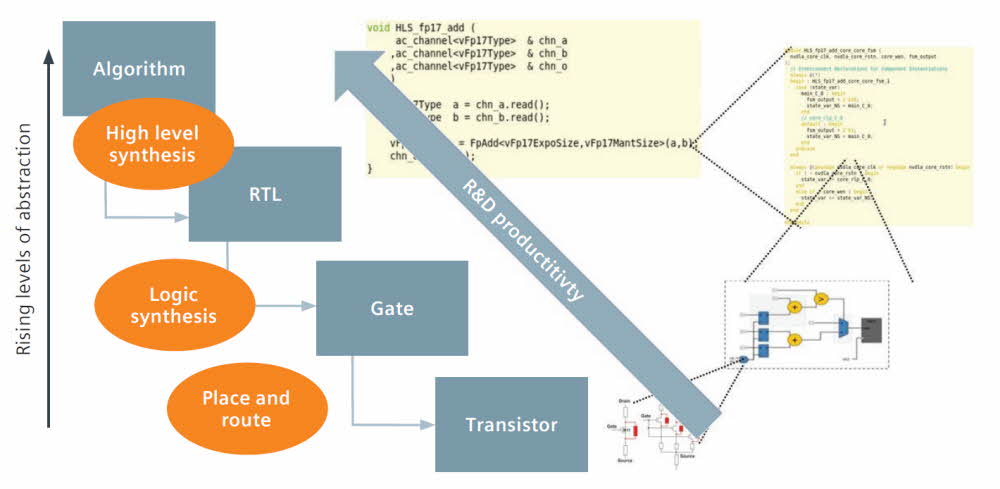 그림 1|HLS는 설계의 추상화 수준을 높여 설계 생산성을 향상시킨다.
그림 1|HLS는 설계의 추상화 수준을 높여 설계 생산성을 향상시킨다.
HLS를 이용해 보다 높은 추상화 수준에서 설계하면 설계시간을 몇 달로 단축할 수 있으며, 필요한 코드 길이가 기존의 RTL 플로에 비해 절반으로 줄어든다. 공정 후반의 기능 변경이나 새로운 기능, 심지어는 기술 노드 간이나 FPGA로부터 ASIC으로의 마이그레이션 조차도 설계 일정에 영향을 미치는 일 없이 수행할 수 있다. 설계 팀은 HLS를 통해 수백 가지 버전의 설계를 살펴봄으로써 칩의 전력, 성능 및 면적을 최적화할 수도 있다. 설계 영역의 탐색을 통해 설계 품질은 수작업 코딩된 RTL의 경우보다 높아진다.
설계팀은 이러한 흐름에 에뮬레이션을 포함시킴으로써 설계 속도를 더욱 높일 수 있다. HLS에서 생성된 RTL은 에뮬레이터에서 인스턴스화 될 수 있어, 소프트웨어 팀이 칩 하드웨어를 입수하기도 전에 소프트웨어를 테스트할 수 있는 플랫폼을 제공한다. 한편으로, 합성된 센서 및 메카트로닉 시스템 데이터를 통합해 현실적인 피드백을 제공하는 가상 환경을 만듦으로써 하드웨어 및 소프트웨어 설계를 최적화할 수 있다.
끝으로, 고급 HLS 솔루션은 강력한 설계 검증을 수행함으로써 디자이너가 RTL(
그림 2)에 착수하기 전에 버그와 오류를 제거할 수 있다. HLS 검증 기능 중에는 C++ 또는 SystemC 코드의 자동 형식 검사, 시뮬레이션 기반의 C-to-RTL 검증, 그리고 RTL로 합성하기 전에 버그와 오류를 찾아내기 위한 형식 등가성 검증이 포함돼 있다.
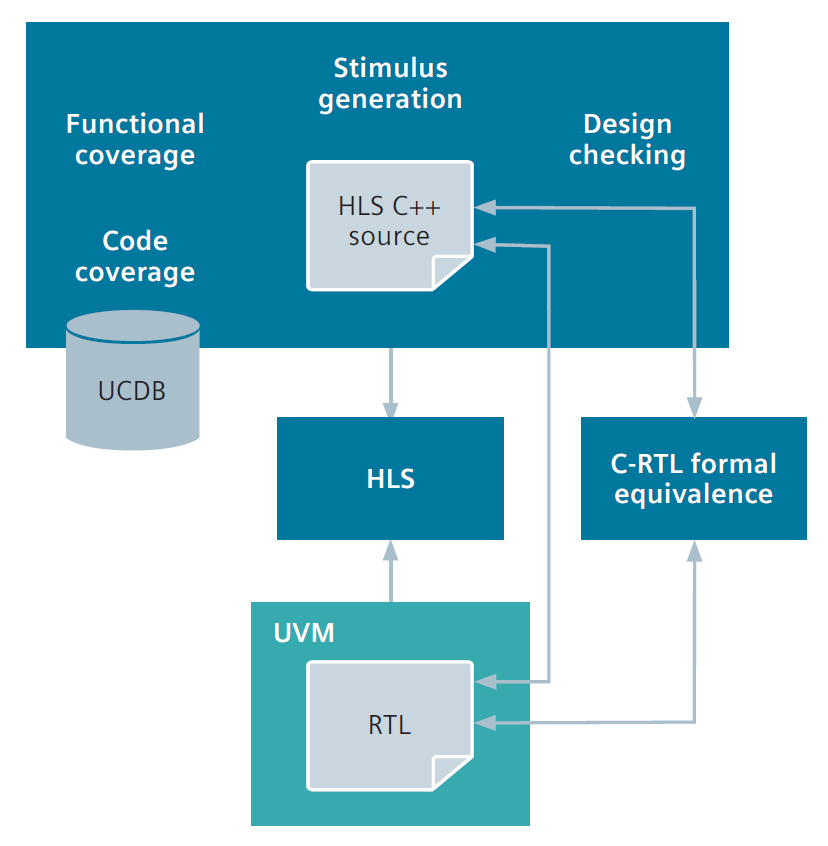 그림 2|고급 HLS 솔루션은 C-to-RTL 검증을 수행함으로써 RTL에 착수하기 전에 버그와 오류를 제거할 수 있다.
그림 2|고급 HLS 솔루션은 C-to-RTL 검증을 수행함으로써 RTL에 착수하기 전에 버그와 오류를 제거할 수 있다.
자율주행차가 가능해지려면 기존의 자동차 제조업체, 스타트업 및 칩 업체 모두가 신경망 컴퓨팅과 컴퓨터 비전에 최적화된 새로운 실리콘 아키텍처를 개발해야 한다. 기존의 설계 방법론은 이러한 요구에 부응해 확장될 수 없다. 자율주행차를 위한 SoC 설계는 너무 복잡해서 수작업 코딩 RTL로는 효율적으로 설계할 수 없다. 검증시간도 걷잡을 수 없이 증가하게 돼 설계를 가능한 빨리 검증해야 한다. HLS는 보다 높은 품질의 SoC 설계를 수작업 코딩된 RTL보다 빠르고 효율적으로 제공할 수 있다. 새로운 HLS 솔루션은 C-to-RTL 자동 검증으로 이러한 장점을 더욱 향상시켜 준다. 요컨대, HLS는 생산성을 최대 열 배까지 향상시킬 수 있으며, 디자인 출시 속도를 네 배나 높일 수 있도록 지원한다.
기능안전성, 검증 및 안전설계
자율주행차를 위한 SoC 설계에 수많은 어려움이 따르긴 하지만, 사실 자율주행차의 성공에 있어 가장 큰 장애물은 대중의 신뢰를 얻는 문제다. 자율주행차 제조업체가 이러한 신뢰를 확립할 수 있는 방법 중 하나는 안전 기준과 인증을 통해 자신들의 플랫폼이 안전하고 신뢰할 수 있음을 입증하는 것이다. 이를 위해 자동차 업계는 전기전자 시스템의 안전성을 나타내는 기능안전성에 초점을 맞춘 일련의 절차와 표준을 제정했다. 기능안전성은 전기 및 전자부품이 고장으로 인해 오작동할 위험을 감소시키는 것이다. 자동차 산업에서는 이러한 절차와 요건이 ISO 26262 표준으로 공식화됐다. ISO 26262는 전자장치에 우발적 하드웨어 고장과 구조적 결함이 있는지 테스트할 것을 요구한다(
그림 3).
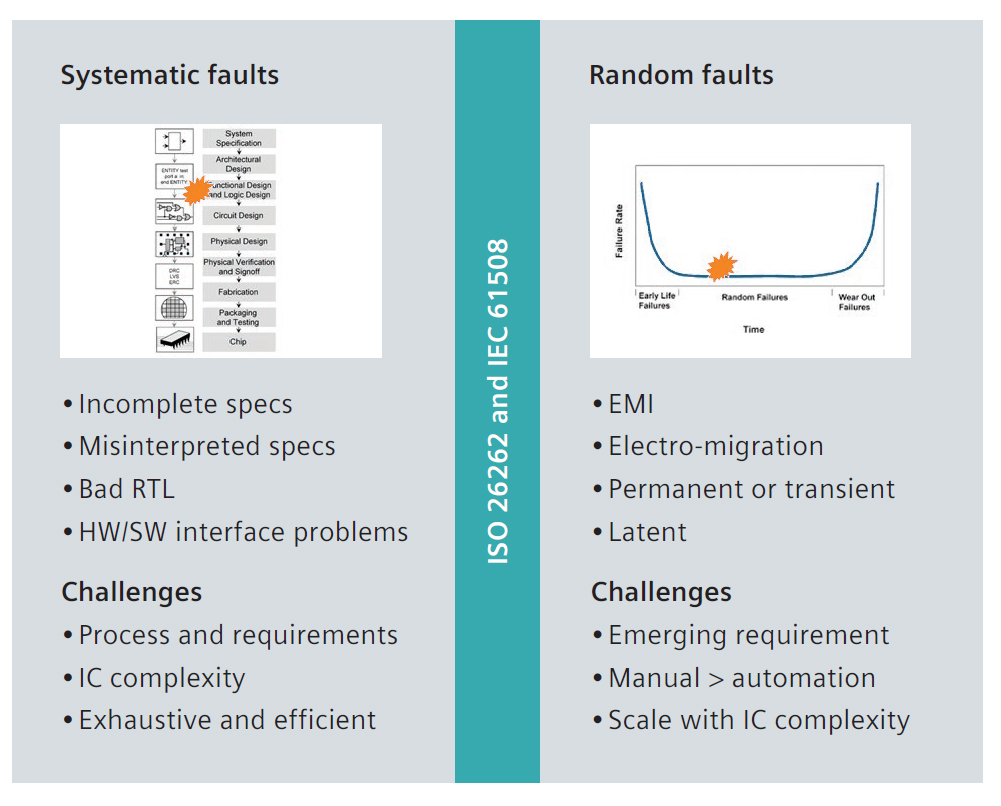 그림 3|ISO 26262는 전자장치에 구조적 결함과 우발적 결함이 있는지 테스트할 것을 요구한다.
그림 3|ISO 26262는 전자장치에 구조적 결함과 우발적 결함이 있는지 테스트할 것을 요구한다.
구조적 결함은 IC가 제품사양에 따라 올바르게 작동하지 못하는 결함이다. 이는 설계상의 버그나 하드웨어/소프트웨어 인터페이스 문제일 수도 있고, 사양의 잘못된 해석이나 불완전한 사양 문제일 수도 있다. 따라서 목표는 강력한 설계 절차, 적격성이 입증된 EDA 툴 및 형식 요건을 통해 구조적 결함을 제거하는 것이다.
반면에, 우발적 하드웨어 고장은 IC가 작동하면서 시간이 지남에 따라 발생한다. 우발적 하드웨어 고장은 전자기 간섭(EMI), 일렉트로마이그레이션(electromigration) 및 기타 전기적 현상으로 인해 발생할 수 있다. 이러한 고장 중 일부는 일시적으로 시간이 지나면 사라지지만, 다른 고장들은 영구적이다. 어느 쪽이든, 임무 수행에 필수적인 자율주행용 IC에서 우발적인 하드웨어 고장이 발생할 경우 끔찍한 결과를 초래할 수 있다. 따라서 ISO 26262에서는 칩에 우발적인 하드웨어 고장이 발생해도 계속해서 작동하거나 안전한 방식으로 고장 나도록 할 것을 요구하고 있다.
완전한 기능안전성 흐름에는 핵심 프로세스 네 가지가 있다(
그림 4).
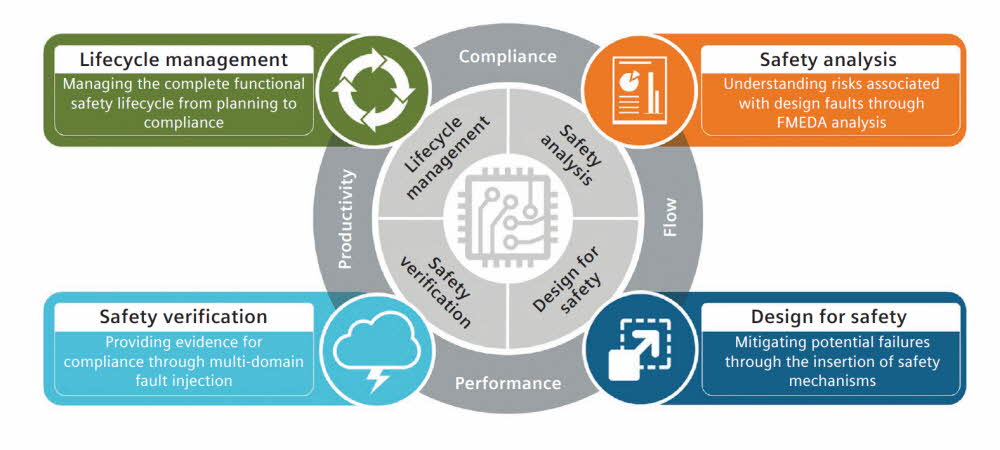 그림 4|기능 안전성의 핵심 프로세스 네 가지는 수명주기 관리, 안전성 분석, 안전성 검증 및 설계 안전성 검토이다.
1. 수명주기 관리에는 계획에서 컴플라이언스에 이르기까지의 기능안전성 수명주기가 망라된다. 여기에는 설계 변경, 요건, 품질 보증 및 감사 또는 컴플라이언스 관리가 포함된다.
그림 4|기능 안전성의 핵심 프로세스 네 가지는 수명주기 관리, 안전성 분석, 안전성 검증 및 설계 안전성 검토이다.
1. 수명주기 관리에는 계획에서 컴플라이언스에 이르기까지의 기능안전성 수명주기가 망라된다. 여기에는 설계 변경, 요건, 품질 보증 및 감사 또는 컴플라이언스 관리가 포함된다.
2. 다음으로 안전성 분석은 고장 모드 영향 및 진단 분석(FMEDA: failure modes, effects and diagnostics analysis)을 이용해 우발적 하드웨어 결함으로 인한 설계의 잠재적 고장 모드를 파악한다. FMEDA는 디자인의 단위시간 당 고장률(FIT)을 자동으로 계산해 단일점 고장 지표(SPFM)와 잠재 고장 지표(LFM)를 추정한다. 안전성 검증 프로세스에서 사용될 결함 목록도 생성된다.
3. 셋째, 안전성을 고려한 설계는 설계의 향상이나 수정을 통해 우발적 하드웨어 결함으로 인한 고장 가능성을 완화하고자 한다. 이는 결함이 있는 동작을 감지해 교정하는 안전 메커니즘을 설계에 삽입해 설계의 동작 및 고장이 안전하게 이루어지도록 함으로써 달성된다. 일부 툴세트는 이러한 삽입 작업을 자동적으로 수행할 수도 있다.
4. 넷째, 안전성 검증은 결함 주입을 이용해 우발적 하드웨어 고장 시의 디자인 및 안전 메커니즘의 거동을 테스트함으로써 디자인이 안전함을 입증한다. 안전성 검증 결과는 단위시간 당 고장률, SPFM/LFM 및 진단 범위(DC)와 비교된다.
과거의 SoC 디자이너와 엔지니어들은 이처럼 중요한 작업일 경우 전문가를 불러 힘든 수작업 절차에 따라 수행하도록 해야 했다. 전문가에 의존하게 되면 SoC 개발 과정에서 병목 현상이 발생하며, 전문가들로서는 자신들의 기술이 요구되는 특별하고 까다로운 문제에 집중할 수 없게 된다. 최근에는 Mentor Safe IC와 같은 솔루션의 고급 포트폴리오로 엄격한 기능안전성 기준을 달성하면서도 수명주기 관리, 안전성 분석, 설계 안전성 검토(DFS) 및 안전성 검증 프로세스를 자동화할 수 있다. 이를 통해 ISO 26262와 같은 업계 표준을 준수하기 위한 기능안전성 검증이 가속화된다.
검증에서의 에뮬레이션 역할
엔지니어는 복잡한 자율주행차용 칩의 기능과 기능안전성을 검증하는 과정에서 칩 디자인에 대해 수없이 많은 복잡한 테스트를 수행하게 된다. 하드웨어 시뮬레이션만으로는 이러한 검증을 적시에 완료하는 데 필요한 속도와 처리량을 제공할 수 없다. 하드웨어 에뮬레이션은 자율주행 차량의 안전성 및 기능 보장에 필요한 수백만 가지 시나리오를 검증하기 위해 필요한 향상 기능이다. 하드웨어 에뮬레이션은 하드웨어 설계에 대한 테스트를 메가헤르츠(MHz)의 속도로 실행한다. 이를 통해 칩 설계가 실리콘으로 구현되기도 전에 시스템 검증을 시작할 수 있으며, 하드웨어 설계에 대한 완전한 가시성을 제공해 효율적인 디버깅을 달성한다. 또한 에뮬레이션은 안전이 필수적인 자동차 애플리케이션에서 결함 주입, 모니터링 및 결과 분석을 지원한다.
에뮬레이션은 설계 흐름의 변경 없이도 공급망 전반에 걸친 협업을 위한 독보적인 유연성을 제공한다. 에뮬레이터는 실리콘이 준비되기 훨씬 전에 특정 IP나 SoC 디자인 전체를 실행할 수 있다. 따라서 엔지니어는 소프트웨어를 구현하게 될 SoC가 계속 발전해나가고 있어도 소프트웨어의 작성 및 테스트를 시작할 수 있다. 그 다음에는 에뮬레이션에 합성 센서 데이터를 입력해 차량의 동작을 모델화한 환경으로 출력함으로써 IP와 소프트웨어가 스티뮬러스에 어떻게 반응하는지 테스트할 수 있다. 에뮬레이션을 이용하면 공급망의 각 레벨에서 조기에 개발을 시작하는 한편, 전체 시스템의 모델 내에서 테스트할 수 있다.
가능한 모든 안전 시나리오를 실세계에서 테스트한다는 것은 실현 불가능한 일이다. 차량이 레벨 1에서 레벨 5의 자동화로 진행됨에 따라, 차량을 제대로 인증하기 위해 조사해야 하는 잠재적 시나리오 수는 수백만 개로 폭증한다. 그 결과, 자율주행차의 안전성과 기능성을 충분히 테스트하고 검증하려면 80억 마일 이상이 필요할 것으로 추정된다. 이 정도 수준의 검증을 달성할 수 있는 유일한 방법은 설계 프로세스 초기에 가상 테스트 환경을 채택하는 것뿐이다.
하드웨어 에뮬레이션은 모델 인더루프(MiL), 소프트웨어 인더루프(SiL) 및 하드웨어 인더루프(HiL) 검증을 지원하며, 칩이나 자동차 하드웨어가 손에 들어오기 전에 칩 또는 자율주행차 플랫폼 전체를 테스트, 프로그램 및 디버깅할 수 있는 환경을 제공한다. 이 테스트 환경에는 세 가지 데이터 유형이 통합된다(그림 5). 첫 번째는 센서 데이터로서, 이 데이터를 센서 하드웨어 없이 생성하기 위해 물리 기반의 첨단 센서 시뮬레이션이 하드웨어 에뮬레이션에 시뮬레이트된 라이더, 레이더, 카메라 및 기타 센서 데이터를 입력한다. 두 번째는 자율주행 IC를 실행하는 에뮬레이터가 제공하는 연산 데이터이다. 세 번째는 메카트로닉 시뮬레이터로서, 운전, 제동 및 구동계로부터 오는 액추에이터 데이터를 제공한다. 첨단 센서 시뮬레이터는 또한 교통 패턴을 생성하고 V2X 통신을 시뮬레이트 해 자율주행 차량 플랫폼의 성능을 완전히 테스트할 수도 있다.
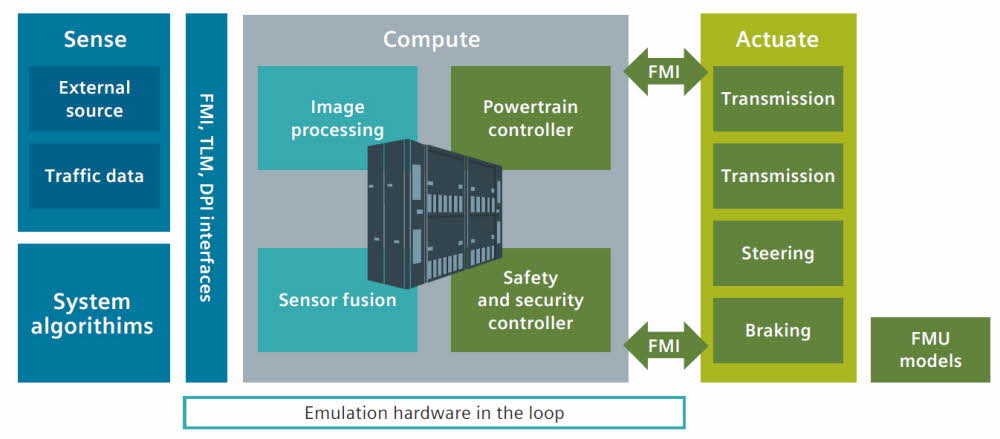 그림 5|하드웨어 에뮬레이션은 센서, 컴퓨팅 및 액추에이션 데이터를 융합해 자율주행차 플랫폼의 테스트 환경을 생성할 수 있다.
물리적 신뢰성 검증
그림 5|하드웨어 에뮬레이션은 센서, 컴퓨팅 및 액추에이션 데이터를 융합해 자율주행차 플랫폼의 테스트 환경을 생성할 수 있다.
물리적 신뢰성 검증
현재 SoC 설계팀은 HLS을 통해 가능해진 신속한 반복 작업으로 칩을 최적화했으며, 그 기능성과 기능안전성을 검증했고, 시뮬레이트된 센서 및 메카트로닉 데이터를 이용해 현실과 같은 가상 주행환경에서 테스트까지 마쳤다. 그 다음에는 디자인의 물리적 신뢰성을 검증해 제조공정에서 충분한 수율을 달성하면서 실제 사용환경에서도 의도대로 작동하도록 해야 한다. 설계에서 제조로 넘어가는 과정은 IC 설계 프로세스에서 극히 중요한 부분으로서, 성공 여부가 판가름 나는 순간이다.
자율주행차용 IC에 필요한 신뢰성을 이해하는 것은 어려운 일일 수 있다. 이는 이제 막 이 시장에 진입하고 있는 기업들에게는 특히 그렇다. 전형적인 차량용 IC는 -40~150°C의 온도 범위와 수백 볼트의 전기 부하에서 최대 30년간 재기능을 수행해야 한다. 자동차 전장이 작동해야하는 혹독한 주행환경과 이러한 IC의 검증을 위한 높은 신뢰성 요건으로 인해, 보다 덜 까다로운 환경에서 사용되는 IC를 개발할 경우에서 흔히 접할 수 없는 설계 및 검증 문제가 야기된다. 설계 표준은 정전기 방전(ESD)이나 전기 과부하(EOS) 규격 준수를 위해 허용 가능한 기준을 요구하지만, 이러한 기준을 충족시키기 위해 필요한 설계상의 절충사항이나 모범 사례를 명시하지는 못한다.
설계규칙 검사(DRC), 레이아웃 대 스키매틱(LVS) 비교 및 전기규칙 검사(ERC)를 위한 기존의 IC 물리검증 툴들은 IC 설계 내의 매우 구체적인 레이아웃 및 회로 문제들을 효율적으로 파악해 해결할 수 있다. 하지만 디바이스의 구현이 보다 큰 회로라는 맥락에서 총체적으로 미치는 영향을 이해하지는 못한다. 표준적인 물리검증 툴들은 디바이스의 네트워크 연결성과 물리적 레이아웃을 동일한 체계 내에서 고려하려 애쓴다.
다행히도, 새로운 등급의 IC 신뢰성 검증 툴은 이러한 문제 영역을 응집력 있는 환경에서 고려할 수 있다. IC 신뢰성 검증의 적용범위를 회로 인식의 맥락에서 개선해야 할 필요성으로 인해 개발된 이 툴들을 통해 회로를 회로 토폴로지 및 레이아웃의 관점에서 구현하는 방법을 분석하는 데 집중할 수 있다. 이 분석의 일환으로 외부 제약사항과 점검의 의도를 통해 어떤 회로가 규정에서 벗어나고 있는지 판단할 수 있다. 이러한 제약사항을 파악하고 평가할 수 있는 신뢰성 검증 툴은 신뢰성 문제를 파악하고 신뢰성 요건과 업계 표준을 준수하도록 보장하는 데 필수적이다.
일반적인 예 한 가지는 인터커넥트에서의 시간 종속적 유전체 파괴(TDDB)에 대한 보호 및 검증(종종 전압 인식 DRC라고 불림)으로서, 이 경우에는 전기 과부하(EOS) 환경에서의 신뢰성 검증이 중요한 역할을 한다. 이 문제는 고장을 피하기 위해 보다 큰 설계 영역이 필요하며, 높은 신뢰성이 필요한 IC 설계에서는 이 문제를 완화시키는 일이 극히 중요하다.
다음으로, 디자이너는 성공적인 제조를 위해 칩의 물리적 레이아웃을 최적화해야 한다. 제조공정 최적화 설계(DFM) 솔루션은 레이아웃 최적화의 자동 수행이나 제조공정 시뮬레이션, 또는 테이프아웃에 앞선 리소그래픽 핫스팟(lithographic hotspots) 관리를 통해 설계자에게 도움을 줄 수 있다. DFM 솔루션은 제안된 레이아웃 변경에 따른 수율 변화를 자동 측정한다. 따라서 설계자는 칩의 제조 수율과 신뢰성이 극대화되는 레이아웃 변경안을 선택할 수 있다.
디지털과 아날로그가 충돌할 경우
자율주행차의 복잡한 디지털 프로세서 및 컨트롤러 SoC는 다양한 센서 시스템을 통해 아날로그 세계와 상호작용하게 된다. 이 시스템 중 일부는 라이더, 레이더 및 컴퓨터 비전 시스템과 같은 첨단 센서들을 관리하기 위해 독자적인 강력한 칩을 필요로 한다. 하지만 이러한 첨단 센서 시스템에 극히 중요한 특정 작업을 수행하는 수많은 소형 스마트 센서 시스템이 없다면 난관에 봉착하게 될 것이다.
많은 기업들이 스마트 센서 시스템을 실현하기 위해 맞춤형 IC를 개발하고 있다. MEMS(Micro-electro-mechanical systems)는 일반적으로 감지 디바이스에 사용되며, 나머지 회로는 CMOS 기술로 구현되는 아날로그/혼성신호(AMS) 설계로 사용된다(
그림 6). 기업들은 맞춤형 IC 디자인의 개발을 통해 기성품 구성요소로 시스템을 개발할 경우에 비해 IC의 비용, 크기 및 전력 소비를 크게 줄일 수 있다. 하지만, AMS 디자인은 여러 설계 영역이 관여되므로 까다롭다. MEMS 디자인은 아날로그 회로와 효과적으로 인터페이스 되어야 하며, 아날로그 회로는 아날로그-디지털 컨버터 및 디지털 로직과 통합돼야 한다.
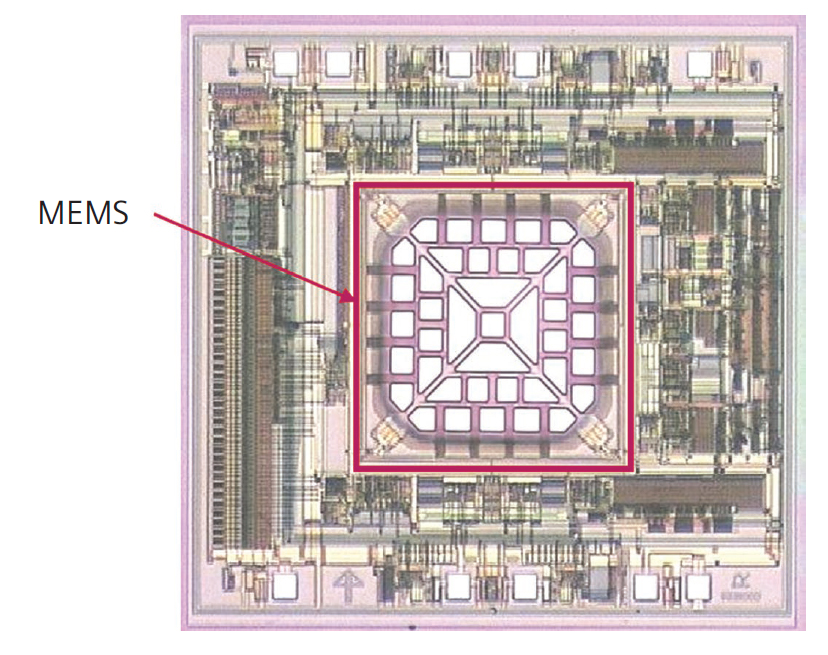 그림 6|CMOS IC에 통합되어 있는 MEMS 디바이스(출처: MEMSIC)
그림 6|CMOS IC에 통합되어 있는 MEMS 디바이스(출처: MEMSIC)
차량용 AMS IC는 또한 수년간, 그것도 종종 혹독한 환경 조건에서 극히 높은 신뢰성을 가지고 작동해야 한다. 디자이너가 이를 달성하기 위해서는 아날로그, 디지털 및 MEMS를 연결해 자율주행차에 필수적인 단일목적 스마트 센서 시스템을 개발할 수 있는 설계 및 검증 통합 솔루션이 필요하다.
노화 시뮬레이션은 차량 애플리케이션에서 매우 중요한데, 이는 장치들이 십 년 이상 신뢰성 있게 작동해야 하기 때문이다. 자동차 애플리케이션은 스트레스를 일으키는 편향성과 열 환경을 가지고 있어서 시간이 지남에 따라 회로의 열화가 발생한다. 시뮬레이션을 이용하면 잠재적인 신뢰성 문제를 조기에 감지해 설계 수준에서 바로잡을 수 있다. 그 다음으로, 전열 시뮬레이션은 자가 발열과 상호 가열로 인한 회로 문제를 처리하는 데 도움이 된다. 마지막으로, 안전 동작 영역(SOA) 시뮬레이션을 통해서는 부품의 수명 시간 동안에 발생할 수 있는 위험한 상황을 감지할 수 있다.
혼성신호 검증은 전통적으로 분할정복 접근법으로서, 디지털 블록과 아날로그 블록을 개별적으로 검증한다. 하지만 비교적 단순한 스마트 센서 IC 조차도 너무 복잡해지고 있어서 이러한 접근법을 사용할 수 없게 됐다. 디지털 검증 기법은 지난 수년간 발전해온 반면에, 혼성신호 검증은 여전히 이를 따라잡으려 애쓰고 있는 형편이다. 현대적인 아날로그 모델링 접근법이 개발되긴 했지만, 아날로그 검증에서는 여전히 정확성이 최우선적으로 요구되고 있다.
또한, 아날로그 및 디지털 설계 환경과 검증 사용 모델은 서로 다르기 때문에 완전한 혼성신호 검증을 위해 IC를 통합하기가 어렵다. 이러한 문제를 해결하기 위해서는 혼성신호 시뮬레이션 솔루션이 빠르고 정확하며 사용하기 쉬워야 하고, 기존의 아날로그 및 디지털 검증 흐름에 완벽하게 통합돼야 한다.
수명주기 전반에 걸친 안전 보장
차량용 IC 생산 특유의 문제점은 설계 및 검증에서 끝나지 않는다. 차량용 IC는 매우 높은 품질 및 신뢰성 기준에 부응해야 하며, 그것도 성능, 전력 및 면적의 최첨단 영역에서 달성돼야 한다. 이러한 문제를 해결하기 위해, IC는 제조 후에 엄격한 테스트를 거친다. IC 테스트는 검사 대상 디바이스(DUT)에 전기신호를 공급한 뒤 그 출력을 예상 값과 비교해 일치하는지 확인하는 작업으로 이뤄진다. IC 테스트 방법은 테스트에 소요되는 시간과 비용을 제한하는 방향으로 발전해 왔다. 하지만, 자율주행용 IC의 복잡성 및 안전성 요건으로 인해 테스트에 소요되는 시간과 비용은 다시금 증가하고 있다.
전통적인 DFT 결함 모델과 테스트 방법론에서는 셀 수준의 입출력에서 발생하는 결함과 셀들 간의 인터커넥트 라인에서 발생하는 일부 결함만을 고려한다. 하지만 이 정도의 추상화 수준으로는 자동차의 전력, 성능 및 면적 요건을 충족시키기 위해 필요한 소형 디바이스 지오메트리에 더 이상 적합하지 않다.
트랜지스터 및 게이트 레벨의 결함을 겨냥한 새로운 자동차 등급의 ATPG 기술이 개발됐다. 이 새로운 방법론의 기반이 되는 셀 인식 테스트(CAT)는 특히 각 셀 내부의 결함을 겨냥하는 결함 모델을 이용한다. 멘토의 CellModelGen 결함 모델 추출 기술은 셀의 레이아웃 주석 Spice 표현을 이용해 트랜지스터, 브릿지, 개로 및 포트 결함이 존재할 수 있는 위치를 파악한다. 셀 레이아웃은 각 잠재 결함의 임계 영역과 관련 결함 확률을 계산해 잠재적인 브릿지 결함을 분석한다. 이 분석을 통해 생성되는 모델은 가능한 가장 높은 결함 감지 성능을 보장하며, 패턴 수를 최소화하고, 진단에 필요한 정보를 보존해 준다. 이처럼 다른 방법으로는 감지할 수 없는 결함을 포착함으로써 디지털 IC 제조업체들이 ISO 26262의 목표인 0 DPPB(defective parts per billion)를 달성하도록 지원한다.
자동차 등급 ATPG는 ISO 26262의 엄격한 표준에 부응해 테스트 품질을 높이는 데 중요한 역할을 해왔다. 하지만 ATPG와 표준 테스트 절차는 제조 후의 칩만을 대상으로 한다. 이러한 칩들을 작동 기간 중에 주기적으로 테스트하는 것은 그 신뢰성을 보장하기 위한 매우 중요한 단계로서, 자동차 칩의 긴 사용수명을 고려할 때 특히 그렇다.
BIST(Built-in self-test)는 현장에서 디지털 로직이나 메모리를 테스트하기 위해 칩에 삽입된 테스트 IP이다. 로직 BIST는 칩 회로에 적용되는 의사 무작위 테스트 패턴을 칩에서 생성한다. 기존의 BIST 기술은 전원을 켤 때 칩을 테스트해 테스트 프로세스가 칩 성능에 영향을 미치지 않도록 한다. 첨단 테스트 솔루션은 칩이 작동하는 동안에 성능에 영향을 미치는 일 없이 테스트를 수행할 수 있다. 또한 ATPG 압축 기능을 BIST에 통합시켜 전원 인가 시의 테스트와 시스템 내 테스트 모두에 대해 제조 품질의 테스트를 수행할 수 있다.
최첨단의 온칩 테스트 컨트롤러는 칩에 삽입된 모든 테스트 IP와 인터페이스 될 수 있다. 이를 통해 OEM과 딜러에 이르기까지 다양한 사용자들이 테스트 IP를 제조 후 용도에 맞게 재구성할 수 있다(
그림 7). 1차 공급사는 이 기능을 이용해 기존 테스트 IP가 ECU 및 기타 제어 장치를 테스트하고 특정 애플리케이션용 기능을 점검하도록 용도를 변경할 수 있다. OEM 수준에서는 테스트 IP를 재구성함으로써 시스템 내 시운전을 수행해 칩이 전체 차량의 일부로서 제대로 작동하도록 할 수 있다. 마지막으로, 딜러는 테스트 IP를 액세스 해 칩 기능을 진단 및 수리하고, 무선 펌웨어 업그레이드(FOTA)를 수행할 수 있게 된다.
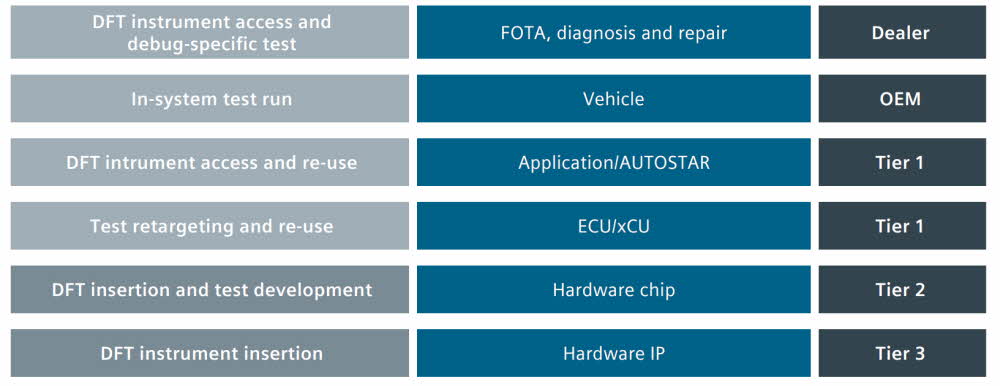 그림 7|첨단 테스트 컨트롤러를 이용하면 공급망의 모든 레벨에서 테스트 IP를 재사용할 수 있다.
그림 7|첨단 테스트 컨트롤러를 이용하면 공급망의 모든 레벨에서 테스트 IP를 재사용할 수 있다.
자율주행차의 성공 여부는 첨단 센서와 강력한 칩으로 구성된 시스템이 엄청난 양의 데이터를 실시간으로 감지해 처리할 수 있는 능력에 달려 있다. 따라서 이러한 칩들은 자율주행에 필요한 전력과 성능 및 면적 요건을 충족시킬 수 있는, 전례 없이 강력한 아키텍처를 필요로 한다. 더 나아가, 자율주행용 IC는 혹독한 환경 조건에서도 기존 가전 제품용의 IC보다 훨씬 더 오랜 시간 동안 거의 완벽한 신뢰성과 정확성으로 기능해야 한다. 시장의 선두주자가 되기 위해 경쟁하고 있는 자동차 스타트업, 기존 OEM 및 시스템 업체들에게는 첨단 설계 자동화 및 수명주기 관리 툴 제품군이 필요하다. 지멘스 디지털 인더스트리 소프트웨어(Siemens Digital Industries Software)는 HLS, 기능안전 및 검증, 에뮬레이션, 물리적 신뢰성 검증, AMS 설계, 혼성신호 검증 및 IC 테스트 분야의 선도적인 솔루션을 보유하고 있어 이러한 툴을 제공할 수 있는 독보적인 위치에 있다.
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>





 PDF 원문보기
PDF 원문보기
